
Version 3.1, 2022
Ressources naturelles Canada, Produit d’information générale 117f.
Ressources naturelles Canada, Sécurité publique Canada.
© Sa Majesté le Roi du chef du Canada, représentée par le ministre des Ressources naturelles, 2022.
Pour obtenir des renseignements sur les droits de reproduction, veuillez communiquer avec Ressources naturelles Canada à l’adresse copyright-droitdauteur@nrcan-rncan.gc.ca.
Table des matières
- 1.0 Introduction et objectif
- 2.0 Note sur la terminologie
- 3.0 Public cible
- 4.0 Structure du guide d’orientation
- 5.0 Résumé des exigences
- 6.0 Guide d’orientation
- 7.0 Glossaire
- 8.0 Références
- 9.0 Historique des révisions
- Appendice 1 – Foresterie
- Appendice 2 – Cartographie des zones inondables
- Appendice 3 – Terrain à fort relief
- Appendice 4 – Cartographie des infrastructures urbaines
- Appendice 5 – Lidar topo-bathymétrique aéroporté
- Appendice 6 − Contrat
Liste des abréviations et des acronymes
- ASPRS
- American Society of Photogrammetry and Remote Sensing
- CCCOT
- Centre canadien de cartographie et d’observation de la Terre
- CGG2013
- Géoïde canadien de 2013
- CGVD
- Système canadien de référence altimétrique
- DNGI
- Densité nominale globale des impulsions
- DQMZ
- Différence quadratique moyenne dans l’axe des z (altitude)
- EAZDV
- Exactitude altimétrique sur les zones dépourvues de végétaux
- EPC
- Exactitude planimétrique calculée
- ENGI
- Espacement nominal global des impulsions
- EPSG
- European Petroleum Survey Group
- EQMR
- Erreur quadratique moyenne planimétrique dans la direction radiale (axes x et y)
- EQMX
- Erreur quadratique moyenne planimétrique dans l’axe des x (estant)
- EQMY
- Erreur quadratique moyenne planimétrique dans l’axe des y (nordant)
- EQMZ
- Erreur quadratique moyenne altimétrique dans l’axe des z (altitude)
- ESRI
- Environmental Systems Research Institute
- EAV
- Évaluation altimétrique de la végétation
- GLONASS
- Globalnaya Navigazionnaya Sputnikovaya Sistema
- GNSS
- Global Navigation Satellite System
- GPS
- Global Navigation System
- GRS80
- Système de référence géodésique de 1980
- Imp.
- Impulsion(s)
- ISO
- Organisation internationale de normalisation
- LAS
- Format de fichier d’échange LASer
- LAZ
- LASzip
- lidar
- Détection et télémétrie par ondes lumineuses
- MNA
- Modèle numérique d'altitude
- MNS
- Modèle numérique de surface
- MNT
- Modèle numérique de terrain
- NQC
- Niveau de qualité canadien
- OGC
- Open Geospatial Consortium
- PDOP
- Affaiblissement de précision de la position
- PIR
- Proche infrarouge
- PPP
- Positionnement ponctuel précis
- RNCan
- Ressources naturelles Canada
- RTK
- Cinématique en temps réel
- SBET
- Meilleure estimation de trajectoire lissée
- SCRS
- Système canadien de référence spatiale
- SNI
- Système de navigation par inertie
- SNRC
- Système national de référence cartographique
- SRFC
- Station de référence à fonctionnement continu
- SRV
- Système de référence virtuel
- TIN
- Réseau triangulé irrégulier
- UMI
- Unité de mesure inertielle
- USGS
- United States Geological Survey
- UTM
- Transverse universelle de Mercator
- WKT
- Well Known Text
- XML
- Langage de balisage extensible
- ZI
- Zone d’intérêt
- ZICD
- Zone d’intérêt pour la collecte des données
1.0 Introduction et objectif
L’élaboration du présent document a été coordonnée par le Centre canadien de cartographie et d’observation de la Terre (CCCOT), qui fait partie de Ressources naturelles Canada (RNCan), en réponse aux besoins de la communauté géospatiale et du gouvernement à l’égard d’un guide d’orientation national pour l’acquisition de données lidar aéroporté. L’une des stratégies clés du CCCOT est d’améliorer l’ensemble des données nationales d’altimétrie par l’application cohérente de la technologie lidar aéroporté. Au Canada, le lidar a été largement adopté par les municipalités, les provinces, les territoires et les ministères fédéraux comme technologie principale pour l’acquisition de données altimétriques de haute précision. Le présent document vise à définir les orientations pour l’uniformisation de l’acquisition des données lidar aéroporté à toutes les échelles du gouvernement du Canada, et pour améliorer la coopération internationale avec les États-Unis le long des zones frontalières où des données sont recueillies.
Afin de favoriser l’harmonisation à l’échelle du gouvernement et de l’industrie, un guide d’orientation de base portant sur les lidar et axé sur les exigences relatives à la constitution d’un ensemble national de données altimétriques à haute résolution a été élaboré. Le processus d’élaboration du guide d’orientation a compris une consultation d’intervenants du gouvernement, de l’industrie et du milieu universitaire, ainsi qu’un examen des pratiques exemplaires à l’échelle internationale afin de fournir une vue d’ensemble. Le guide d’orientation national tient compte de nombreuses considérations complexes, dont l’acquisition de données, le traitement et la validation de celles-ci, et les produits à livrer, et il est axé sur l’élaboration de données précises d’altimétrie. Le guide d’orientation met l’accent sur les exigences relatives à la qualité et à l’exactitude des données, et ce, sans limiter l’innovation et les futures avancées technologiques. Le présent guide d’orientation n’a pas pour but de limiter les exigences propres aux projets, mais il existe des cas où certaines spécifications liées à l’acquisition de données lidar peuvent être assouplies ou modifiées en raison de facteurs telles les exigences relatives aux données du projet et des considérations financières. Le présent guide d’orientation vise à établir des niveaux de qualité et des bonnes pratiques afin de répondre aux divers besoins du gouvernement fédéral. Le guide d’orientation contient également des directives additionnelles pour l’acquisition de données lidar dans des champs d’applications spécifiques, notamment en foresterie, en cartographie des plaines inondables et en cartographie des régions à fort relief et des infrastructures urbaines.
L’industrie du lidar en est une qui dépend fortement de la technologie de pointe et qui, de ce fait, voit des améliorations constantes au niveau des logiciels et des méthodes utilisées dans le cadre des analyses lidar et des composantes technologiques utilisées pour la réalisation des levés. Le présent document reflète les pratiques exemplaires en matière d'acquisition de données lidar au moment de sa publication. RNCan entend mettre régulièrement à jour ce document, au fur et à mesure que l’industrie se développera.
2.0 Note sur la terminologie
Le présent guide d’orientation contient de nombreuses références à des termes utilisés spécifiquement dans l’industrie et qui peuvent varier par rapport à d’autres secteurs d’application ou d’autres lignes directrices ou spécifications. Par exemple, dans le domaine des lidars, le terme « MNA du sol nu » est couramment utilisé pour désigner la surface du terrain. Dans le présent guide d’orientation, le terme « modèle numérique de terrain (MNT) » est utilisé conformément à la terminologie de la Spécification de produit du Modèle numérique d'élévation de haute résolution (MNEHR) - Série CanÉlévation (PDF, 1.1 Mo). L’abréviation MNT est considérée comme un équivalent de MNA du sol nu. Les termes MNA et MNE sont considérés comme équivalents. De plus, le terme « impulsion » est utilisé pour représenter l’énergie laser électromagnétique émise et reçue, tandis que le terme « données ponctuelles » représente les données qui ont été post-traitées et classifiées en un nuage de points. Un glossaire, inclus dans le présent document, définit les termes utilisés dans le contexte du présent guide d’orientation.
3.0 Public cible
Le présent document, qui fait partie de la Série de guides d’orientation fédéraux sur la cartographie des inondations au Canada, est destiné à être utilisé en tant que ressource pour l’acquisition de données d’altitude de base à partir de données lidar aéroporté aux quatre coins du Canada. Il vise à fournir des conseils aux ministères fédéraux, provinciaux et territoriaux qui ont pour responsabilité de fournir des directives techniques à leurs organismes de mise en œuvre. Le présent document est également destiné aux personnes et aux organisations canadiennes qui ont besoin de comprendre et de planifier l’acquisition de données lidar par levés aériens. Les utilisateurs du présent guide d’orientation peuvent comprendre les gestionnaires de ministères, les coordonnateurs de projets, les experts en géomatique, les ingénieurs en ressources hydriques et les planificateurs du gouvernement et de l’extérieur. Le document présume que les utilisateurs ont une connaissance de base de la technologie et des données lidar, y compris de la terminologie et de la structure des données.
Certaines provinces et certains territoires ont déjà élaboré leur propre guide d’orientation pour l’acquisition de données par lidar aéroporté. Le présent guide d’orientation sert de base pour harmoniser davantage les exigences relatives à l’acquisition de données lidar à l’échelle du Canada.
4.0 Structure du guide d’orientation
Le guide d’orientation a été organisé selon une structure organisationnelle comprenant des volets de planification, de collecte, de traitement, de validation de données et de fourniture de produits de données lidar aéroporté dans le contexte d’un paysage canadien. Les informations relatives aux applications de la cartographie des forêts, des infrastructures urbaines, des plaines inondables et des zones à fort relief figurent dans les annexes du présent document, lesquelles comprennent notamment les pratiques exemplaires en matière de collecte de données lidar aéroporté. Les données et les paramètres de collecte recommandés sont également fournis dans cette section. En outre, le présent guide d’orientation comprend aussi une annexe portant sur les éléments contractuels liés à la collecte de données dans le cadre de projets. Le présent guide est structuré en catégories, comme suit :
- Planification
- Acquisition
- Traitement des données
- Validation
- Produits à livrer
5.0 Résumé des exigences
Les exigences concernant l’acquisition de données lidar aéroporté sont résumées dans le tableau 1 et présentées sous la forme de formules génériques. Le « niveau de qualité canadienne 1 » (NQC1) correspond à l’exigence minimale pour l’acquisition de données lidar aéroporté au Canada, ainsi que pour supporter la Stratégie nationale de données d’élévation du Gouvernement du Canada. Cette stratégie vise à mettre à la disposition des canadiens une représentation tridimensionnelle détaillée du territoire et d’offrir des produits standardisés qui permettent des analyses cohérentes dans tout le pays.
Certains domaines d’application nécessitent des données lidar plus précises et/ou plus denses que le NQC1. Pour ces acquisitions lidar, les formules génériques présentées dans le tableau 1 peuvent être utilisées pour établir les exigences. Des exemples de valeurs à utiliser dans les formules (en remplacement des termes DNGI, EQMz et EQMR) figurent dans les annexes du présent document pour divers domaines d’application.
La section 6 fournit de plus amples détails sur la planification de projets, la validation des données et les produits à livrer. On y trouve également des recommandations, des postulats et des considérations. De la même manière que pour la section 5, les tableaux de la section 6 comportent des formules génériques et les valeurs relatives au NQC1. Il est recommandé aux utilisateurs de lire l’ensemble du présent document pour en apprendre plus sur les exigences.
| Exigences | Spécifications génériques | Exemple pour le Niveau de qualité canadienne 1 (NQC1) | Catégorie |
|---|---|---|---|
| Densité nominale globale des impulsions (DNGI) | ≥ DNGI | ≥ 2 impulsions/m2 | Acquisition |
| Espacement nominal global entre impulsions (ENGI) | 0,71 m | Acquisition | |
| Exactitude altimétrique - zone dépourvue de végétation (EAZDV) | |||
| Erreur quadratique altimétrique moyenne (EQMZ) | ≤ EQMZ | ≤ 10,0 cm | Acquisition |
| Exactitude altimétrique – niveau de confiance de 95 % | ≤ 1,96 x EQMZ | ≤ 1,96 x 10→19,6 cm | Acquisition |
| Exactitude altimétrique – zone végétalisée (EAV) – 95e percentile | ≤ 3 x EQMZ | ≤ 3 x 10→30 cm | Acquisition |
| Exactitude planimétrique fondamentale (EPF) | |||
| Erreur quadratique planimétrique moyenne (EQMR) | ≤ EQMR | ≤ 35,1 cm | Acquisition |
| Exactitude planimétrique – niveau de confiance de 95 % | ≤ 1,7308 x EQMR | ≤ 1,7308 x 35,1 → 60,0 cm | Acquisition |
| Exactitude planimétrique calculée (EPC) | ≤ EQMR | ≤ 35,1 cm | Acquisition |
| Exactitude altimétrique relative | |||
| Intrafauchée (répétabilité sur surfaces lisses) (DQMZ) | ≤ 0,6 x EQMZ | ≤ 0.6 x 10 → 6 cm | Validation |
| Interfauchée (écart dans le chevauchement des fauchées) (DQMZ) | ≤ 0,8 x EQMZ | ≤ 0.8 x 10 → 8 cm | Validation |
| Interfauchée (différence dans le chevauchement des fauchées) – écart maximal | ≤ 1,6 x EQMZ | ≤ 1.6 x 10 → 16 cm | Validation |
| Plan de référence planimétrique | Variable | NAD83 SCRS époque 2010 | Acquisition |
| Plan de référence altimétrique | Variable | CGVD2013 | Acquisition |
| Modèle du géoïde | Variable | CGG2013 | Acquisition |
| Projection cartographique | Variable | Transverse Universelle de Mercator | Acquisition |
| Chevauchement minimal interfauché | 15 % | 15 % | Acquisition |
| Retours d’impulsion | Minimum 2 retours (premier et dernier). Intermédiaires sont facultatifs. | Minimum 2 retours (premier et dernier). Intermédiaires sont facultatifs. | Acquisition |
| Classification | Variable | 1 – Traité mais non classifié 2 – Sol 7 – Points bas (bruit) 9 – Eau 17 – Tabliers de pont 18 – Bruit élevé |
Traitement |
6.0 Guide d’orientation
6.1 Planification de projet
Avant la collecte de données lidar aéroporté, le fournisseur entreprendra des activités visant à concevoir un plan d’acquisition et un plan de traitement de données qui respectent les spécifications du présent document. Les principales activités de planification sont indiquées dans les sections qui suivent. Ces activités constitueront une partie des produits à livrer dans le cadre du projet. Les sections ci-dessous indiquent le type d’informations qui seront réunies sous forme de rapport de projet.
6.1.1 Méthode du projet
Description
Le fournisseur est tenu de fournir les détails de la méthode qu’il a retenue pour satisfaire les exigences techniques des spécifications. La méthode de projet doit être décrite dans un rapport de planification de projet qui sera présenté préalablement à la collecte de données.
Exigences
Les principales exigences relatives à la méthode du projet sont présentées dans le Tableau 2.
| Nom | Description | Catégorie |
|---|---|---|
| Planification du vol | Détails relatifs à la zone couverte par le vol, l’emplacement des lignes de vol et des lignes transversales d'arrimage, y compris des références visuelles telles des cartes et des images. Un plan de travail détaillé comprenant des mesures de contrôle de la qualité ainsi qu’un processus d’arpentage sera fourni. | Planification |
| Contrôle d’arpentage | La mesure de contrôle d’arpentage proposée appuyant le système GNSS aéroporté et les mesures de validation au sol seront présentées en détail, y compris les stations de base (actives ou passives) qui seront utilisées et les informations de référence sur le contrôle de position. | Planification |
| Vérification au sol | Détails relatifs à la vérification prévue au sol et aux mesures in situ, y compris l’emplacement et la méthode proposée de collecte de données de levés au sol. | Planification |
| Traitement des données | Détails portant sur le traitement prévu des données, y compris les logiciels, les méthodes, le filtrage et toutes autres données auxiliaires qui seront utilisés pour le traitement des données. Un schéma de déroulement des travaux montrant les étapes du traitement des données et les procédures de contrôle de la qualité intégrées aux activités de traitement sera aussi inclus. | Planification |
| Contrôle de la qualité | Méthode de validation des données, vérification de la classification, vérification de l'exactitude, de zones vides au sein des nuages de points et autres vérifications des données. L’information devrait comprendre la fréquence de l’échantillonnage ainsi que la quantité d’échantillons prélevés. | Planification |
| Calendrier | Calendrier prévu de collecte de données aéroportées et de vérification au sol. | Planification |
Considérations, limites et postulats
Tout écart par rapport à la méthode du projet sera communiqué à l’autorité contractante avant la collecte des données, aux fins d’examen et d’approbation.
6.1.2 Instrumentation
Description
Un document fournissant des détails sur l’équipement d’arpentage aéroporté et au sol qui sera utilisé dans le cadre du projet doit être fourni. Ce document devrait comprendre les spécifications (y compris le fabricant, le modèle et l’année) du capteur lidar, du système GNSS utilisé dans l’aéronef, du capteur UMI et de l’instrumentation de levé au sol. De plus, le document devrait fournir des informations sur l’étalonnage des capteurs, notamment la date du dernier étalonnage. Enfin, le document devrait être fourni dans le cadre des produits à livrer du projet.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Capteur | Des détails concernant le capteur lidar seront fournis, notamment le nom du fabricant, l’année, le modèle, le propriétaire, ainsi que la date du plus récent étalonnage. Une copie du plus récent certificat d’étalonnage du système complet par le fabricant, y compris pour le laser, l’UMI et le système GNSS utilisé peut être exigée. Ce certificat doit être fourni sur demande. Toute modification au capteur, toute défaillance de celui-ci ou tout remplacement avant ou pendant la collecte des données doit être signalé. | Planification |
| GNSS | Le type de capteurs de position utilisés pour l’acquisition (au sol et dans les airs) doit être documenté. Il incombe d’indiquer le nom du fabricant, l’année et le modèle du capteur. Toute information sur le réseau de référence (actif ou passif), y compris le numéro, les monuments d’emplacement, les énoncés de référence et les coordonnées publiées, doit être fournie. | Planification |
| UMI | Il incombe de fournir les détails relatifs à l’UMI pour la collecte des données, y compris le nom du fabricant, l’année et le modèle. | Planification |
Considérations, limites et postulats
Tout écart par rapport à l’instrumentation proposée doit être communiqué à l’autorité contractante avant la collecte des données, aux fins d’approbation. L’instrumentation de rechange doit être de qualité égale ou supérieure aux capteurs prévus. L’autorité contractante se réserve le droit d’accepter ou de refuser les changements proposés.
6.1.3 Planification de la collecte des données
Description
Les exigences minimales relatives à la planification de la collecte des données lidar aéroporté sont énoncées ci-dessous.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Zone d’intérêt (ZI) | Une zone d’intérêt pour le projet est définie sous la forme d’une limite géographique fermée définie d'après le système de coordonnées établi dans le présent guide d’orientation. | Planification |
| Zone d’intérêt pour la collecte de données (ZICD) | Une zone tampon de 100 mètres est appliquée uniformément à la ZI. Cette zone tampon représente la région couverte par les activités de collecte de données. Les données recueillies dans la zone tampon doivent être soumises dans le cadre des produits à livrer et elles doivent être recueillies selon les mêmes exigences que les données recueillies dans la ZI. | Planification |
| Retours discrets | Les systèmes utilisés pour recueillir les données doivent pouvoir recueillir de multiples retours discrets par impulsion. Au minimum, premier et dernier retours sont exigés. Les retours intermédiaires sont facultatifs. Les données sur la forme d’onde sont optionnelles. | Planification |
| Intensité | L’intensité de chacun des retours discrets sera enregistrée et stockée sous forme de valeur normalisée à 16 bits. Un rehaussement linéaire sera appliqué comme défini dans la spécification ASPRS LAS 1.4 R15. | Planification |
| Chevauchement des fauchées | Un chevauchement des fauchées d’au moins 15 % est requis pour une acquisition selon le NQC1. Le pourcentage de chevauchement demandé par l’autorité contractante dans le contrat d’acquisition peut toutefois être plus élevé. | Planification |
Considérations, limites et postulats
L’acquisition de données lidar aéroporté dépend de l’utilisation d’une source de données de référence pour établir avec précision l’emplacement des retours d'impulsions lidar provenant de la surface terrestre. Les données de référence servant à cartographier l’emplacement des signaux réfléchis utilisent un ensemble de systèmes mondiaux de navigation par satellites (GNSS). Ces systèmes comprennent différentes constellations (GPS, GLONASS, QZSS, Galileo ou BeiDOU). Toutefois, l’application du système de positionnement GNSS est affectée par la géométrie des satellites et les éruptions solaires qui créent de l’instabilité dans l’ionosphère. Il est recommandé qu’un affaiblissement de la précision de position (PDOP) soit toujours inférieur à 3, qu’au moins 7 satellites soient toujours en vue et que la météorologie solaire soit vérifiée avant et pendant la collecte des données. En ce qui concerne la correction des signaux GNSS, les stations au sol devraient habituellement se trouver dans un rayon maximum de 25 à 35 km de la collecte sur le terrain. Selon la taille et la configuration de la ZICD, deux stations ou plus pourraient être requises lorsque le rayon d’action dépasse les 35 km. La correction GNSS à contrôle actif pour la cinématique en temps réel (RTK) qui utilise des stations de référence opérationnelles continues (SROC) pour la correction en temps réel ou le post-traitement, comme le positionnement ponctuel précis (PPP) des levés géodésiques canadiens, est acceptée. L'utilisation de corrections PPP dérivées de satellites est également autorisée. Le fournisseur doit fournir des informations sur la méthode positionnelle et s’assurer que la solution proposée satisfait les exigences en matière d’exactitude du présent guide d’orientation. De plus amples renseignements se trouvent dans les Lignes directrices concernant les levés GNSS en mode RTK/RTN au Canada (2013).
- Les lignes de vol transversales d'arrimage sont des lignes de vol acquises perpendiculairement aux lignes de vol prévues pour l’acquisition des données. Les lignes de vol transversales d'arrimage fournissent des données qui appuient la validation de l’exactitude et qui peuvent être utilisées pour appuyer l’ajustement des données, notamment dans les cas de mauvaise PDOP inattendue. Il est fortement recommandé d'acquérir ce type de lignes afin d’appuyer l’évaluation et la validation de la qualité des données.
- Il est recommandé que les fauchées se chevauchent d’au moins 15 % pour une acquisition selon le NQC1 afin d’appuyer l’évaluation de la qualité entre les fauchées adjacentes et de réduire le plus possible les vides potentiels dans les nuages de points. À l’heure actuelle, le chevauchement des fauchées lors des activités de collecte est laissé à la discrétion du responsable de la collecte de données afin de s’assurer qu’il n’y a aucun vide dans les portions utilisables des fauchées (typiquement au centre de 95 % de la largeur de la fauchée) et que la densité des données requises est atteinte.
- L’angle de balayage utilisé pour la collecte des données lidar aéroporté est habituellement compris entre ±15 et ±30 degrés. Des angles de balayage plus larges ne sont pas recommandés puisqu’ils entraînent une empreinte accrue, ce qui réduit l’énergie de l’impulsion aux extrémités de la fauchée et accroît les erreurs de positionnement et la diffusion sur les arêtes des structures verticales. En outre, lors de la collecte sur des terrains ondulés et/ou en relief élevé, des angles de balayage plus élevés sont déconseillés. Les pratiques exemplaires misent sur des angles variant entre ±20 et ±25 degrés. La sélection des angles de balayage devrait tenir compte des objectifs du projet et des exigences en matière d’exactitude altimétrique et planimétrique.
6.2 Collecte de données
Cette section fournit les détails pour rencontrer les exigences d’acquisition de données lidar aéroporté.
6.2.1 Conditions
Description
La collecte de données lidar est affectée par les conditions à la surface et dans l’atmosphère, lesquelles ont une incidence sur la qualité et la quantité de retours d’impulsions lidar. Cette section décrit les exigences minimales (atmosphériques, de surface et autres) requises pour l’acquisition de données lidar aéroporté.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Atmosphériques | La collecte ne devrait pas avoir lieu lorsqu’il pleut, lorsqu’il neige, ou lorsqu’il y a de la fumée ou du brouillard. Il ne devrait pas y avoir de brume sèche ou de nuages entre l’aéronef et le sol. | Acquisition |
| Surface | La surface ne doit pas être inondée, elle ne doit pas être recouverte de neige et il ne doit pas y avoir d’accumulations de glaces sur les rives ou au sol. Pour que l’acquisition des données puisse avoir lieu, le sol doit être sec. La présence de givre est acceptable. |
Acquisition |
| Marées | En ce qui concerne les zones affectées par les marées, la collecte de données doit avoir lieu à moins de deux heures de la marée basse. La marée basse est le moment où la marée sera à son point le plus bas pour le lieu et l'heure donnés où la collecte aura lieu. | Acquisition |
| Levé | L’activité solaire et les conditions du GNSS affectant l’affaiblissement géométrique de la position lors de l’acquisition doivent faire l’objet d’un suivi et être consignées. | Acquisition |
| Considérations temporelles | Outre l’exigence de marée basse, il n’y a aucune restriction quant au moment de la journée où l’acquisition de données lidar peut avoir lieu. Les données peuvent être acquises de jour comme de nuit, pourvu que la collecte de données respecte les dispositions réglementaires ou juridiques et que les exigences en matière de sécurité soient scrupuleusement respectées. | Acquisition |
Considérations, limites et postulats
- On encourage la collecte des données lidar lorsque le débit des cours d’eau est à son plus bas (étiage) afin de maximiser la couverture du lit des rivières et des plaines inondables.
- À la discrétion de l’autorité contractante, on peut passer outre à l’exigence voulant que la surface ne soit pas enneigée pour les zones où l’on retrouve en permanence des champs de neige ou des glaciers.
- Sauf pour les projets spéciaux de collecte de données sur la végétation (par exemple, les études portant sur la biomasse forestière), il est préférable de procéder à la collecte de données lorsque les arbres ont perdu leurs feuilles puisque cela autorise une meilleure pénétration au sol et donne une surface de sol nu de meilleure qualité (voir l’annexe A). La collecte de données lorsque les arbres portent leurs feuilles peut être acceptable si la méthode de collecte du fournisseur permet d’atteindre un niveau de pénétration suffisant pour obtenir une caractérisation fiable et précise du sol nu qui satisfait aux exigences. L’autorité contractante travaillera de pair avec le fournisseur afin de déterminer les conditions de végétation acceptables pour une acquisition de données lidar dans la ZICD.
- Un couvert de neige très mince (moins d’un centimètre) n’occasionnant pas de poudrerie peut être acceptable. La décision est laissée à la discrétion de l’autorité contractante.
6.2.2 Densité des impulsions pour la collecte de données
Description
Dans le présent guide d’orientation, la densité et l’espacement des impulsions lidar dans la ZICD sont définis comme étant la densité nominale globale des impulsions (DNGI) et l’espacement nominal global entre les impulsions (ENGI). La densité / espacement de l'impulsion globale est appelée une densité / espacement de l'impulsion globale, de sorte qu'une bande peut chevaucher d'autres bandes complètement, partiellement ou pas du tout. On obtient un chevauchement de fauchée lorsqu’une partie de celle-ci est recouverte par une ligne de vol adjacente, lorsqu’un capteur unique survole une partie de fauchée déjà observée, ou que des données sont acquises par deux capteurs indépendants à l’aide d’UMI distinctes à l’aide d’axes de visée distincts d’un même aéronef. On considère qu'un système à deux canaux exploitant un seul système de navigation par inertie (SNI) acquière des données dans une seule fauchée. Pour ce qui est des fauchées qui n’ont aucun chevauchement, la DNGI/ENGI est équivalent à la densité nominale des impulsions (DNI) et à l’espacement nominal entre les impulsions (ENI). Prière de consulter le glossaire pour de plus amples détails à ce sujet.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Densité nominale globale des impulsions (DNGI) | ≥ DNGI (impulsions/m2) évalué avec les premiers retours dans la ZICD | Acquisition |
| Espacement nominal global entre impulsions (ENGI) | Acquisition | |
| Retours laser | La collecte de données par impulsions repose sur les retours d’impulsions laser reçues au niveau du senseur. Au minimum, les premiers et les derniers retours sont nécessaires et les retours intermédiaires sont optionnels. | Acquisition |
Note : pour le NQC1, remplacez DNGI par 2. Pour les domaines d'application nécessitant des données lidar plus denses que NQC1, utilisez les valeurs de DNGI suggérées dans les annexes du présent guide.
Considérations, limites et postulats
- Dans le présent guide d’orientation, la DNGI et l’ENGI renvoient à la densité et à l’espacement global net des impulsions pour de multiples capteurs indépendants ou de multiples fauchées qui se chevauchent. Pour ce qui est des fauchées uniques, la DNGI et l’ENGI correspondent à la DNI et à la ENI, respectivement.
- Les impulsions intermédiaires peuvent fournir des informations additionnelles pour les applications axées sur les forêts/les arbres, les lignes de transmission/distribution d’énergie et les bâtiments.
6.2.3 Précision de la collecte de données
Description
Cette section porte sur les exigences d’exactitudes altimétrique et planimétrique absolue et relative lors de l’acquisition de données lidar.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Exactitude altimétrique, zone dépourvue de végétation (EAZDV) | ||
| Erreur quadratique moyenne altimétrique (EQMZ) | ≤ EQMZ | Acquisition |
| Exactitude altimétrique – niveau de confiance de 95 % | ≤ 1,96 x EQMZ | Acquisition |
| Exactitude altimétrique – zone végétalisée (EAV) - 95e percentile | ≤ 3 x EQMZ | Acquisition |
| Exactitude planimétrique fondamentale (EPF) | ||
| Erreur quadratique moyenne planimétrique (EQMR) | ≤ EQMR | Acquisition |
| Exactitude planimétrique – niveau de confiance de 95 % | ≤ 1,73 x EQMR | Acquisition |
| Exactitude planimétrique calculée (EPC) | ≤ EQMR | Acquisition |
| Exactitude altimétrique relative | ||
| Intrafauchée (répétabilité des surfaces lisses et dures) (DQMZ) | ≤ 0,6 x EQMZ | Acquisition |
| Interfauchée (écarts dans le chevauchement des fauchées – (DQMZ) | ≤ 0,8 x EQMZ | Acquisition |
| Interfauchée (différence dans le chevauchement des fauchées) – écart maximal | ≤ 1,6 x EQMZ | Acquisition |
Note : pour le NQC1, remplacez EQMZpar 10 cm et EQMRpar 35,1 cm. Pour les domaines d'application nécessitant des données lidar plus précises que NQC1, utilisez les valeurs de EQMZ et EQMRsuggérées dans les annexes du présent guide.
Exactitude planimétrique calculée (EPC) – L’exactitude planimétrique est influencée par les erreurs positionnelles du GNSS, les erreurs angulaires provenant de l’UMI utilisée et de l’altitude de vol. Une exactitude planimétrique calculée sera dérivée à l’aide de l’erreur quadratique planimétrique moyenne du lidar (EQMr) énoncée dans la norme ASPRS 2014 Positional Accuracy Standards for Digital Geospatial Data, section 7.5. La formule est la suivante :
Plus de détails sur l’utilisation de la formule sont donnés ici : Mapping Matters Download Article: Download (PDF 1,160.9 kb) (en anglais seulement)
Considérations, limites et postulats
- L’évaluation de l'exactitude devrait être réalisée à l’intérieur de la partie de la fauchée géométriquement utilisable (habituellement la bande qui occupe 95 % de la largeur de la fauchée à partir du centre). L’exactitude planimétrique et altimétrique des points de vérification au sol doit être 3 fois plus précise que l’exactitude exigée pour la donnée lidar, et toujours meilleure que 5 cm (95 %). Voir la section 6.4.1 pour plus de détails.
- L’exactitude altimétrique relative est utilisée pour examiner la stabilité géométrique dans toutes les parties de la fauchée et vérifier l’uniformité des données. La partie de chevauchement peut être considérée comme une mesure de l’alignement géométrique de deux fauchées qui se chevauchent par rapport aux décalages positionnels et à l’alignement vertical. En outre, l’exactitude relative est une mesure prise à l’intérieur de la fauchée qui permet de détecter toute donnée d’impulsion anormale potentielle causée par des problèmes avec le laser ou par des irrégularités du capteur. L’évaluation doit être réalisée à plusieurs endroits dans la ZICD. Voir la section sur la validation des données pour de plus amples renseignements.
6.3 Traitement et gestion des données
6.3.1 Format des fichiers de données
Description
Les données de nuages de points lidar recueillies devraient être stockées dans le format ASPRS LASer (.las). En ce qui concerne le stockage de masse des données, les fichiers LAS peuvent être compressés sans perte dans le format LAZ (LAS zippé).
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Norme | La norme ASPRS LAS 1.4 – R15 sera utilisée pour le stockage des données de nuages de points lidar. La norme LAS 1.4 passe à une structure de fichiers 64-bits. | Traitement des données |
| Contenu | Le champ de l’en-tête public doit être rempli. | Traitement des données |
| Données d’impulsion | Les formats d’enregistrement 6, 7, 8, 9 ou 10 devront être utilisés pour les données d’impulsions discrètes. Le format dépendra de l’ajout ou non d’informations couleur et de l’ajout ou non de paquets d’ondes à la structure de dossier LAS. | Traitement des données |
| Chevauchement et dépassement (Overage) | Les impulsions de dépassement (overage) dans la zone de chevauchement de fauchée (c.-à-d. Les points qui ne font pas partie du filet) doivent être identifiées comme utilisant le bit de chevauchement 3 tel que décrit dans le tableau 16 de la spécification LAS 1.4 - R15 ‘Specification for record format 6’. La classification de points de dépassement / chevauchement n'est pas autorisée. Voir la définition de dépassement dans le glossaire. | Traitement des données |
| Impulsions mises de côté (Withheld) | Les impulsions mises de côté en raison du bruit, de points de données erronés et de points peu fiables sur le plan géométrique devraient être retenues au moyen du bit de classification 2 (Withheld), conformément au tableau 16 de la spécification LAS 1.4 – R15. | Traitement des données |
| Identification des fauchées | Un identificateur de fichier unique pour les fauchées individuelles doit être appliqué avant le traitement des données et il doit être disponible pour lier chacune des fauchées à une source, tel qu’indiqué dans la spécification LAS 1.4. Un identificateur de source ponctuelle (Point Source ID) doit également être affecté à chacun des points à l’intérieur d’une fauchée, et cet identificateur doit correspondre à l’identificateur de fichier unique. Ces deux identificateurs doivent être permanents et être conservés tout au long du processus de traitement des données. | Traitement des données |
| Géoréférencement | Une géoréférence appropriée et adéquatement formatée doit être présente dans tous les en-têtes des fichiers LAS. On utilisera le Well Known Text (WKT) du Open Geospatial Consortium (OGC) comme système de coordonnées de référence (SCR). | Traitement des données |
| Accès libre | Seul le format libre LAS doit être utilisé. Aucun format exclusif n’est accepté. | Traitement des données |
| Compression | La compression du format LAS à l’aide d’un produit logiciel libre est acceptable pour la gestion des données. La compression doit être sans perte et assurer une conversion harmonieuse qui préserve toutes les informations. Le format LAZ est le format de compression recommandé. L’autorité contractante indiquera le format de fichier spécifique requis en qualité de produit à livrer. | Traitement des données |
| Temps GPS | Chaque mesure de position d’un aéronef effectuée par le Système mondial de navigation par satellite (GNSS) doit être horodatée au moyen de l’heure ajustée du système mondial de localisation (GPS) et ce, à une précision suffisante pour permettre l’application d’horodatages uniques à chacune des impulsions lidar. L’heure GPS ajustée est l’heure du satellite GPS moins 1x109. La balise de codage de l’en-tête LAS doit être correctement réglée. | Traitement des données |
| Unités de mesure | Les mesures sont exprimées en mètres (m) et doivent comprendre, au minimum, 3 décimales. | Traitement des données |
Considérations, limites et postulats
- Les spécifications sur la géoréférence sont actuellement établies dans la norme OGC 2001 WKT qui a depuis été obsolète. En 2015, OGC a adopté les normes ISO WKT. Cependant, les normes ASPRS LAS sont toujours basées sur le texte OGC 2001 WKT. La mise à jour de la spécification de géoréférence peut être requise dans l'avenir.
- À sa discrétion, l’autorité contractante peut exiger les données de forme d’onde, lesquelles sont optionnelles.
- Toutes les données recueillies dans la ZICD doivent être traitées et fournies en tant que produit à livrer. Aucune donnée d’impulsion ne doit être supprimée des fichiers de fauchée LAS.
6.3.2 Classification des impulsions
Description
Toutes les données sur les impulsions lidar, à l’exception des impulsions mises de côté, seront assujetties à un processus de classification. Tous les éléments topographiques de surface (végétation, bâtiments et autres objets) sont filtrés pour produire des données ponctuelles de « sol nu ». Le logiciel et les processus utilisés, tout comme le recours à des données auxiliaires pour atteindre le seuil d'exactitude de la classification est laissé à la discrétion du fournisseur. La structure de la classification reposera sur la spécification LAS 1.4 – R15 pour le format d’enregistrement 6-10 de données ponctuelles, tableau 17. Les impulsions non désignées comme étant retenues doivent être traitées aux fins de classification. Aucun point du nuage de points LAS ne doit être assigné à la classe 0 (donnée créée, mais non classée), excepté les points mis de côtés (Withheld).
Exigences NQC1
Puisque les exigences de classification peuvent varier en fonction des besoins, seule la désignation de classe minimale pour le NQC1 est indiquée ici. Il est conseillé d’exiger cette classification minimale.
| Nom | Description | Catégorie |
|---|---|---|
| Classification | 1 – Traitée mais non classifiée 2 – Sol 7 – Points bas (bruit) 9 – Eau 17 – Tabliers de ponts 18 – Bruit élevé |
Traitement des données |
Considérations, limites et postulats
- Si des lignes de rupture sont requises, il est recommandé d’inclure la classe 20 – segment au sol ignoré (à proximité d’une ligne de rupture). Remarque : La classe 10 LAS de l’ASPRS qui a été utilisée dans le passé pour les points au sol ignorés est maintenant affectée aux points de type ferroviaire.
- Les points créés à partir de techniques indépendantes des données lidar telles que la numérisation à partir d'un modèle stéréoscopique de photographies aériennes sont considérés comme des points synthétiques. Les points synthétiques sont déconseillés et, s'ils sont utilisés, doivent être classés en utilisant un encodage dont le bit est réglé à la valeur 0. Les détails sont fournis dans le cadre du rapport de projet. Voir le Tableau 16 Spécification ASPRS LAS 1.4 R15 pour point (s) synthétique (s).
6.3.3 Système de coordonnées de référence
Description
Le système de coordonnées des données lidar livrées sera fondé sur les besoins du client. On recommande toutefois de s’aligner au Système Canadien de Référence Spatiale (SCRS) et d’utiliser des altitudes orthométriques.
Exigences NQC1
Puisque les exigences relatives aux systèmes de référence peuvent varier en fonction des besoins, seule la désignation pour le NQC1 est indiquée ici.
| Nom | Description | Catégorie |
|---|---|---|
| Système de référence planimétrique | NAD83 SCRS, époque 2010 | Traitement des données |
| Système de référence altimétrique | CGVD 2013 | Traitement des données |
| Modèle de géoïde | CGG2013a | Traitement des données |
| Projection cartographique | Projection transverse universelle de Mercator (UTM) | Traitement des données |
Considérations, limites et postulats
- Lorsque des données d’impulsions lidar sont demandées dans des systèmes de coordonnées projetés utilisant des zones (e.g. UTM, MTM), les données devraient être traitées en se limitant à une seule zone pour chaque jeu de données, sauf aux endroits où la ZICD s’étend dans plusieurs zones et où l’ensemble de données serait assujetti à des distorsions inacceptables. Les données seraient dans ce cas divisées en sous-régions selon les zones qui s'appliquent. Les tuiles complètes, avec une couverture complète des données, devraient être conservées lorsque les données sont divisées entre les zones. Une tuile de chevauchement doit être maintenue dans chaque zone. Chaque sous-région sera traitée et présentée en tant que livrable de sous-projet distinct. Les exigences appliquées au projet s’appliqueront également à chacun des sous-projets.
- Le système de référence NAD83(SCRS) est un système de référence géométrique en trois dimensions utilisé par la plupart des organismes fédéraux et provinciaux en tant que norme nationale de référencement. Ce système utilise l’ellipsoïde du GRS80 comme ellipsoïde de référence et le modèle géoïde actuel (présentement CGG2013a) pour convertir des altitudes ellipsoïdales en altitudes orthométriques dans le plan de référence altimétrique CGVD2013. Les coordonnées NAD83(SCRS) peuvent être exprimées en tant que coordonnées géographiques (latitude, longitude et altitude ellipsoïdale) ou en coordonnées projetées (estant, nordant et hauteur), et peuvent être transformées à l’aide d’un logiciel de transformation géodésique à partir d’autres systèmes de référence, par exemple le système WGS84. Les récepteurs GNSS utilisent le système WGS84 en tant que système par défaut de référence des coordonnées pour les hauteurs ellipsoïdales. Les Levés géodésiques du Canada (LGC) offrent un certain nombre de services et d’applications pour transformer les coordonnées. L’application logicielle GPS-H permet de traiter des données dérivées du GNSS afin de transformer des hauteurs ellipsoïdales soit en systèmes de référence de coordonnées ITRF (compatibles avec WGS84, lequel est actuellement harmonisé avec ITRF08), ou des hauteurs orthométriques de l’époque du NAD83(SCRS) en système de référence altimétrique CGVD28 ou CGVD2013. L’application logicielle TRX permet de transformer des coordonnées entre les systèmes NAD83(SCRS) et diverses réalisations ITRF. Ce logiciel permet la conversion entre les systèmes géographiques, les systèmes cartésiens et les systèmes de coordonnées locales. Les coordonnées NAD83(SCRS) de l’époque actuelle peuvent aussi être obtenues directement par le post-traitement de données statistiques ou cinématiques brutes GNSS au moyen de données du Système de contrôle actif canadien (CACS) et/ou du service en ligne de positionnement ponctuel précis (SCRS-PPP). Le service SCRS-PPP utilise les meilleures éphémérides et corrections ionosphériques disponibles. Des produits dits « ultrarapides » sont utilisés environ 90 minutes après la collecte de données et offrent une exactitude de ±15 cm. Les produits « rapides » sont utilisés au cours de la journée suivante et offrent une exactitude de ±5 cm. Enfin, les produits finaux sont utilisés après 13 jours et offrent les positions très précises pour les données brutes d’observation (±2 cm). Il est laissé à l’acquéreur de données de déterminer si la solution SCRS-PPP satisfait adéquatement aux normes NCQ1 pour l'emplacement et le temps de collecte des données.
- Les codes EPSG sont une norme efficace et un moyen efficace d'attribuer un système de référence de coordonnées. Il existe actuellement 52 codes EPSG différents pour les différents systèmes de coordonnées projetés et un pour le NAD83(SCRS) (EPGS : 6140). Cependant, le code EPSG : 6140 traite les différentes réalisations et les époques de NAD83(SCRS) comme identiques et ne reconnaît pas les différences. Au Canada, chaque province a adopté une réalisation et une époque différente de NAD83(SCRS). Ceux-ci ne sont actuellement pas reconnus au moment de la publication, mais il est prévu qu’ils le seront au cours de la prochaine mise à jour du registre EPSG. À l'avenir, l’utilisation des codes EPSG comme système de référence de coordonnées mérite d'être envisagée.
- Les systèmes de référence virtuels (SRV) s’appuient sur un réseau de récepteurs GNSS qui sont espacés les uns par rapport aux autres d’environ 40 à 60 km. Les récepteurs GNSS servent de stations de référence à fonctionnement continu (SRFC). Les informations colligées par les récepteurs GNSS diffusent activement les corrections locales au réseau. Les corrections sont téléchargées pour la surveillance et la correction en temps réel des récepteurs GNSS statiques et RTK. Lors de l’utilisation du contrôle SRV, il est recommandé de mettre en œuvre les étalonnages et les vérifications appropriés afin de valider les données et les résultats. Les récepteurs SRV constituent une autre solution potentielle pour le contrôle des récepteurs GNSS aéroportés et au sol. L’utilisation de ces réseaux pour s’assurer que les exigences d’exactitude sont respectées est permise, à la discrétion du fournisseur et de l’autorité contractante.
6.3.4 Famille de points
Description
Une impulsion lidar transmise peut avoir un ou plusieurs retours. L'ensemble complet de retours multiples résultant d'une seule impulsion lidar est considéré comme une famille de points.
Exigences
Les familles de points (retour des « enfants » multiples d'une seule impulsion « parent ») seront conservées tout au long du traitement avant le tuilage. Les retours multiples d'une impulsion donnée seront stockés dans l'ordre séquentiel (ordre d'acquisition).
Considérations, limites et postulats
Les systèmes avec des lasers à plusieurs canaux ou des points multiples dans l'air maintiendront les familles d'impulsions pour chaque retour d'impulsion unique.
6.3.5 Structure de tuilage
Description
Le traitement des données lidar comprendra la préparation et la fourniture des données à l’aide d’une structure de tuilage.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Dimension | 1 km x 1 km | Traitement des données |
| Condition | Contiguïté parfaite des bordures, aucune lacune et aucun chevauchement. | Traitement des données |
| Nomenclature | Chaque tuile doit être désignée selon la norme de nomenclature ci-dessous. | Traitement des données |
| Géoréférencement | Un système de coordonnées de référence et les unités des données seront utilisés. | Traitement des données |
| Type | Les données d’impulsion, les données ponctuelles et les données de trame devront utiliser la même structure de tuilage. | Traitement des données |
| Format | Les tuiles de données seront produites en format LAS ou LAZ, tel que déterminé par l’autorité contractante. | Traitement des données |
| Fichier d’index | Un fichier d’index numérique (fichier de forme ESRI) doit être fourni avec les données. La convention d’appellation des fichiers doit figurer dans le tableau d’attributs, et des champs distincts doivent être prévus pour les références de l’index, le nom du projet et la date d'acquisition des données. | Traitement des données |
Les tuiles seront créées au moyen d’une convention d’appellation unique reposant sur les principes suivants :
- La structure doit être conçue de manière à être facilement programmable.
- Chaque tuile doit être définie de façon unique dans l’ensemble de données, et ce, sur les plans temporel et positionnel de sorte qu’il n’y ait aucune duplication.
- Le nom de fichier doit être facile à interpréter et doit clairement indiquer le contenu du fichier.
- La structure doit respecter les normes, notamment celles qui concernent les codes postaux des provinces et des territoires.
Le tableau 12 présente sommairement une convention d’appellation des fichiers de données lidar.
| Nom | Description | Exemple |
|---|---|---|
| Province/territoire | Abréger les noms selon la norme relative aux codes postaux | Ont., C.-B., Yuk., etc. |
| Identification ou nom du projet | Nom de projet court (maximum 20 caractères), habituellement une référence géographique comme une ville, un village, un bassin hydrographique ou une région. | Kitmat, ParcBanff, LongPoint, 2698A |
| Date de collecte des données du projet | Année et mois (AAAAMMJJ) de la date de fin de la collecte. | 20170511 |
| Système de référence | Référence au système de coordonnées ou à la projection cartographique. | NAD83SCRS_UTMZ9 |
| Dimension de la tuile | Taille de la tuile, en kilomètres | 1 km |
| Coordonnées du coin de la tuile | À partir du coin sud-ouest de la tuile, établir les valeurs d’estant et de nordant UTM. Utiliser une valeur à 4 chiffres pour l’estant et à 5 chiffres pour le nordant - EXXXX_NYYYYY | E5237_N59906 |
| Niveau de qualité | Champ réservé au niveau de qualité du produit de données | NQC1 |
| Produit | Court nom pour les produits lidar tels des données ponctuelles classifiées, des données fusionnées avec des orthophotographies ou des produits dérivés tels des MNS. | CLASS – Classification du nuage de points CLASSRGB DTMR – MNT de sol nu matriciel BEP – sol nu – données ponctuelles sur les points sol DSMR – Modèle numérique de surface matriciel UNCLASS – Nuage de points non classifiés INT – Image d’intensité HS – Estompage CHM – Modèle de hauteur de la canopée Etc. |
| Extension de fichier | Extensions de fichiers normales utilisées | LAS, LAZ, TIF et shp |
Le format est le suivant :
P/T_NomouIDduprojet_Datecollecteduproject(AAAAMMDD)_Systèmedecoordonnées_
Tailledetuile_Coindetuile(SOE)XXXX_NYYYYY_Niveauqualité_Extension.Produit
Exemple :
BC_Kitmat _20170511_NAD83SCRS _UTMZ9_1km_E5237_N59906_NQC1_CLASS.LAS
Considérations, limites et postulats
Pour les données lidar ayant des spécifications de densité ou de précision supérieures à NQC1, aucun niveau de qualité ne doit être indiqué dans le nom.
6.3.6 Produits dérivés
Il a été déterminé que les produits dérivés, à l’exception des classifications d’impulsions, ne sont pas visés par la portée du présent guide d’orientation. Toutefois, certains produits, tels les MNT à grille ou matriciels et les images d’intensité et d’estompage peuvent être créés afin d’appuyer l’évaluation de la qualité. Pour de plus amples renseignements sur les produits dérivés, voir le document Modèle numérique d'élévation de haute résolution (MNEHR) - Série CanÉlévation – Spécifications de produit (PDF, 845 KB).
6.4 Validation des données
L’évaluation de la qualité des données lidar dans le cadre du présent guide d’orientation implique la mise en œuvre de procédures de validation. Cette approche vise à s’assurer que les exigences relatives à la qualité sont satisfaites. Dans le présent guide d’orientation, plusieurs procédures de contrôle de la qualité ont été jugées indépendantes pour évaluer si les exigences touchant les données lidar ont été satisfaites. Les vérifications de la qualité comprennent ce qui suit :
- Précision du positionnement
- Répartition spatiale et régularité
- Densité des impulsions
- Zones sans données
- Classification des impulsions
- Exactitude relative
Il incombe à l’autorité contractante de choisir un groupe qui réalisera les vérifications indépendantes de la qualité en tout ou en partie. Le groupe peut être constitué d’une ou de plusieurs organisations indépendantes, d’intervenants internes du client ou du fournisseur de services de collectes de données.
6.4.1 Précision du positionnement
Description
La vérification de l'exactitude du positionnement lidar planimétrique et altimétrique devrait être effectuée au moyen de points de vérification indépendants. Les points de vérification devraient être divisés en zones sans végétation et avec végétation. Les points de contrôle peuvent être acquis par le fournisseur qui recueille les données lidar, par l’autorité contractante ou par une tierce partie indépendante, à la discrétion de l’autorité contractante. Le processus de collecte de points de vérification repose sur le choix de la taille de la zone d’échantillonnage, le type de couverture terrestre présente dans la zone d’échantillonnage, le nombre de zones d’échantillonnage et le nombre de points de vérification à acquérir. Le processus de validation des points de vérification devrait respecter au moins les lignes directrices de l’ASPRS relatives aux normes de prévision de la position pour les données géospatiales numériques 2014 (ASPRS 2014). Les lignes directrices de l’ASPRS établissent le nombre recommandé de points de vérification pour l’évaluation de l’exactitude planimétrique et altimétrique des données d’altitude en fonction de la ZI (tableau C.1). Des points de vérification seront recueillis pour évaluer l’exactitude altimétrique en zone dépourvue de végétaux (EAZDV), l’exactitude altimétrique en zone végétalisée (EAV), et l’exactitude planimétrique fondamentale, tel que décrit ci-dessous.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Exactitude altimétrique, zone dépourvue de végétaux (EAZDV) | Les points de vérification servant à l’évaluation de l’exactitude altimétrique en zones sans végétaux seront relevés dans des zones à découvert dépourvues d’éléments verticaux (p. ex. : végétation, véhicules, poteaux, câbles, etc.), où les impulsions lidar entraînent un seul retour. La zone du relevé doit avoir une taille minimale de (ENGI x 5)2 et devrait être caractérisée par un terrain plat présentant une pente de moins de 10 degrés. Couvertures terrestres acceptables : zones à découvert constituées d’herbes basses (pelouses et terrains de golf), de sols dénudés et de zones urbaines pavées. Les zones perturbées où la surface a été modifiée (p. ex. : champs labourés) ne sont pas acceptables. Le levé devrait être bien réparti afin de représenter l’ensemble de la ZI et les divers types de couvertures terrestres qui s’y trouvent. L’EAZDV doit respecter les exigences présentées dans le tableau 7 de la section 6.2.3. |
Validation |
| Exactitude altimétrique-zone végétalisée (EAV) | L’évaluation de la EAV sera réalisée dans des zones végétalisées (herbes hautes, cultures, broussailles, petits arbres et forêts). La zone du relevé doit mesurer au moins (ENGI x 5)2 et présenter un sol plat (pente inférieure à 10 degrés). L’EAV doit respecter les exigences présentées dans le tableau 7 de la section 6.2.3. |
Validation |
| Exactitude planimétrique fondamentale (EPF) | Les points de vérification servant à l’évaluation de l’exactitude planimétrique fondamentale devraient être acquis sur des entités linéaires bien définies présentant des ruptures claires au niveau de l’altitude ou de l’intensité (p. ex. : marques sur la chaussée, bâtiments, murs, rails de chemin de fer et bordures de revêtements routiers). Les zones doivent être planes (pente inférieure à 10 degrés) et présenter une surface dure ou compacté L’EPF doit respecter les exigences présentées dans le tableau 7 de la section 6.2.3. | Validation |
Les exactitudes altimétrique et planimétrique absolues seront évaluées à la lumière des points de vérification EAZDV et EAV. La vérification de l’exactitude altimétrique est également réalisée pour le MNT, les EAZDV et les EAV. Les exigences relatives au contrôle des MNT seront fournies par l’autorité contractante.
- L’évaluation de l’exactitude présume que les erreurs sont réparties normalement et donc, que les mesures comme les EQM sont statistiquement valides. Une méthode numérique de rechange pourrait être requise si les erreurs ne sont pas réparties normalement.
- Le nombre de zones d'échantillonnage de points de vérification pour l'évaluation combinée de la précision est basé sur les normes ASPRS Positional Accuracy Standards for Digital Geospatial Data version 1 Novembre 2014. La zone d'échantillonnage de point de vérification désignée est équivalente à (ANPS x 5)2. Pour les projets avec un site d'intérêt inférieur à 500 km2, un nombre minimal de zones d'échantillonnage des points de vérification est déterminé par l'autorité contractante. Pour les projets de plus de 500 km2 et de moins de 2 500 km2, le nombre de points de vérification sera une expansion linéaire du tableau C.1 de l'ASPRS 2014 en tant que superficie minimale d'échantillonnage, soit environ 1 point de contrôle par 25 km2. L'autorité contractante peut demander que des points de vérification supplémentaires soient effectués par le fournisseur ou indépendamment pour vérifier l'exactitude des données. Cela peut inclure la sélection de zones de couverture de terrain et topographie variées. Pour le contrôle altimétrique dans des zones > 2 500 km2, ajouter cinq points de vérification verticaux supplémentaires pour chaque zone supplémentaire de 500 km2. Chaque ensemble supplémentaire de cinq points de vérification verticaux pour 500 km2 comprendrait trois points de vérification pour l’EAZDV et deux points de vérification pour l'EAV. Le nombre et la répartition recommandés des points de vérification EAZDV et EAV peuvent varier en fonction de l'importance des différentes catégories de couverture terrestre et des exigences de l'autorité contractante. Pour le contrôle planimétrique de zones de plus de 2 500 km2, l'autorité contractante devrait déterminer le nombre de points de vérification horizontaux supplémentaires, le cas échéant, en fonction de critères tels que la résolution de l'imagerie et l'étendue de l'urbanisation.
- L’évaluation de l’exactitude planimétrique fondamentale (EPF) impliquera la réalisation d’un échantillonnage au-dessus de surfaces présentant des entités linéaires visibles ou des entités facilement identifiables au sol à l’aide d’une image d’intensité interpolée.
- En général, le nombre minimal de points de vérification qu’il faudra recueillir dans les zones d’échantillonnage est de 20, mais il serait préférable d’en recueillir 30 répartis uniformément dans la ZI et proportionnellement distribués pour la EAZDV et la EAV comme recommandé dans la norme ASPRS Positional Accuracy Standards for Digital Geospatial Data version 1 Novembre 2014. Les points de contrôle peuvent être répartis de manière plus dense à proximité d'entités importantes et de manière plus dispersée dans des zones qui présentent peu ou pas d'intérêt. L’autorité contractante peut ajuster le nombre de points de vérification à recueillir dans des endroits problématiques ou en raison de zones difficiles pour la EAZDV, la EAV et la EPF.
- Les points de vérification ne seront pas examinés dans les zones caractérisées par une absorption extrême du rayonnement dans le proche infrarouge (PIR) (bitume frais, sol humide ou toiture de bâtiment en bardeaux d’asphalte), ou dans les zones qui sont proches de changements abrupts dans la réflectivité PIR (plage de sable blanc à proximité de l’eau), puisque de tels changements abrupts provoquent habituellement des décalages verticaux non naturels dans les mesures d’altimétrie lidar.
- En ce qui concerne les couvertures terrestres autres que les forêts et les villes à forte densité, les points de vérification devraient se trouver en des lieux exempts d’obstructions au-dessus de 15 degrés au-dessus de l’horizon (afin d’améliorer la réception GNSS et de maximiser la collecte d’impulsions lidar).
- Les points de vérification doivent être des points indépendants utilisés uniquement aux fins de l’évaluation de l’exactitude altimétrique et/ou planimétrique des données recueillies. Ils ne peuvent en aucun cas servir à l’étalonnage ni être intégrés à l’acquisition des données.
- L’arpentage des points de vérification pour chaque type d’évaluation (EAZDV, EAV et EPF, lorsque possible) devra être équitablement réparti dans l’ensemble de la ZI.
- - Les points de vérification altimétrique et planimétrique du relevé doivent être au moins trois fois plus précis que l’exactitude requise des données lidar à acquérir, et toujours meilleure que 5 cm (95%). L’autorité contractante peut demander un niveau d’exactitude supérieur pour les points de vérification. Outre les points de contrôle nouvellement acquis, des points historiques peuvent aussi être utilisés, pourvu que ces derniers aient été acquis au cours des trois dernières années et qu’ils n’aient pas été utilisés à des fins d’étalonnage ou acquis dans le cadre du projet actuel. Les points historiques doivent tous satisfaire l’ensemble des exigences relatives aux points de vérification, et les conditions de surface à l’emplacement des points de vérification doivent être invariables dans le temps et non perturbées. L’autorité contractante doit être informée d’avance si des points historiques seront utilisés. Cette dernière se réserve le droit de rejeter les points en totalité ou en partie.
- La vérification de l’exactitude altimétrique des données ponctuelles utilisera un modèle de réseau triangulé irrégulier (TIN) pour effectuer la comparaison entre les données ponctuelles et les points de vérification. Le premier et unique retour d’impulsion sera utilisé pour créer le TIN. Ce dernier sera utilisé pour extraire la valeur interpolée à l’endroit où les points de vérification ont été recueillis aux fins de la comparaison.
Considérations, limites et postulats
- Tous les points de vérification requis doivent être acquis à l’intérieur de la ZI. Toutefois, à la discrétion de l’autorité contractante, des points de contrôle supplémentaires peuvent être recueillis dans les zones tamponnées de 100 mètres.
- Dans certains ZICD, les restrictions d'accès, la sécurité, les terrains difficiles et les contraintes de transport peuvent empêcher la distribution spatiale souhaitée des points de contrôle sur tous les types de couvertures terrestres. Lorsqu'il n'est pas géométriquement ou pratiquement possible d’appliquer les recommandations de points de vérifications recommandés, les fournisseurs de données de concert avec l’autorité contractante le doivent utiliser leur meilleur jugement professionnel pour appliquer l'esprit de cette méthode décrite dans la norme ASPRS Positional Accuracy Standards for Digital Geospatial Data version 1 Novembre 2014 dans la sélection des emplacements pour les points de vérification.
6.4.2 Répartition spatiale et régularité
Description
Les impulsions comprises dans la partie géométriquement utilisable de la fauchée (habituellement la portion située à 95 % dans le centre de la fauchée) seront recueillies uniformément afin de produire une distribution régulière en forme de treillis. Bien que les capteurs lidar ne recueillent pas de données selon une disposition régulière, la collecte sera conçue et exécutée afin de produire un groupement de premiers retours en nuage de points s’approchant d’un treillis régulier d’impulsions, tel que défini dans les exigences ci-dessous.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Répartition spatiale et régularité | L’uniformité de la répartition spatiale des impulsions et la régularité de la répartition de celles-ci sont évaluées à l’aide d’une grille de répartition couvrant l’ensemble du projet et les premiers retours d’impulsions se trouvant dans la partie centrale géométriquement utilisable de chacune des fauchées. Les zones sans données en seront exclues. La résolution de la grille de répartition devrait équivaloir à deux fois l’ENGI. (Ex pour le NQC1 : 2 x 0,71 m = 1,42 m). L’exigence quant à l’uniformité est d’avoir au moins une impulsion par cellule de la grille dans 90 % des cellules. |
Validation |
Considérations, limites et postulats
- L'approche utilisée pour compter les impulsions lidar dans la grille de distribution dépend de l'outil logiciel utilisé. Certains outils logiciels utilisent un compte basé sur des impulsions qui entrent dans la cellule de la grille et d'autres utilisent un rayon de recherche pour compter les impulsions qui se situent dans une grille. Pour les outils logiciels qui utilisent une approche de rayon de recherche pour déterminer les comptes dans une cellule de grille, le rayon de recherche doit être égal à la ENGI établie.
- L’évaluation exclut les zones dépourvues de données jugées acceptables, tel qu’indiqué dans la section 6.4.4.
- Cette analyse n’est associée qu’à la répartition régulière et uniforme des points. L’évaluation ne vise pas l’examen de la DNGI ou de la DNI à l’échelle de la ZICD (voir la section 6.4.3).
- Ce seuil peut être remplacé par un autre pour les zones à fort relief, à la discrétion de l’autorité contractante.
6.4.3 Vérification de la densité des impulsions
Description
Une vérification des données est menée afin de s’assurer que la DNGI a été atteinte à l’échelle de la ZICD. Une grille de densité des impulsions est utilisée pour déterminer si la densité des impulsions voulue a été atteinte pour le NQC indiqué. L’exigence précise est définie dans le tableau ci-dessous :
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Matrice de densité des impulsions | La vérification de la densité des impulsions sera réalisée à l’aide d’une grille dont la dimension des cellules est de 20 m x 20 m couvrant l’ensemble de la ZICD. | Validation |
| Évaluation | La DNGI doit être satisfaite au moins 90 % du temps dans les cellules de la grille de densité des impulsions de la ZICD, d’après les premiers retours. Une grille visuelle indiquera en rouge les cellules n’atteignant pas la DNGI et en vert les cellules atteignant la DNGI. Un histogramme sera utilisé pour quantifier la distribution de la densité des impulsions. | Validation |
Considérations, limites et postulats
- L’évaluation exclut les zones dépourvues de données jugées acceptables, tel qu’indiqué dans la section 6.4.4.
- Une densité d’impulsions insuffisante pourrait nécessiter une nouvelle collecte de données dans les zones concernées, et ce, à la discrétion de l’autorité contractante.
6.4.4 Zones sans données
Description
Des données du nuage de points lidar peuvent être perdues en raison de l’absorption des impulsions à la surface ou de la réfraction du laser dans le proche infrarouge, en raison de problèmes de capteur, d’anomalies au niveau du traitement ou d’une collecte de données inadéquate. Les vides locaux de données provoqués par des erreurs au niveau de la collecte et du traitement doivent être cernés et corrigés. Ces lacunes en matière de données ne sont pas permises dans la ZICD, comme l’indiquent les exigences.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Vides locaux de données | Par « données manquantes » on entend toute région ayant une superficie égale ou supérieure à (4 x ENGI)2 qui n’est mesurée qu’à l’aide des premiers retours. Les lacunes en matière de données dans une fauchée unique ne sont pas acceptables, sauf lorsque l’absence de données est causée par des plans d’eau, par une faible réflectivité du rayonnement dans le proche infrarouge, ou aux endroits où les données manquantes ont été remplacées adéquatement par des données provenant d’une autre fauchée. Les fauchées chevauchantes qui sont utilisées comme fauchées de remplacement doivent satisfaire toutes les exigences indiquées dans le présent guide d’orientation. | Validation |
Considérations, limites et postulats
L’autorité contractante pourrait exiger du fournisseur qu’il survole à nouveau la région concernée afin d’acquérir de nouvelles données si les vides de données excèdent le seuil prescrit.
6.4.5 Précision de la classification des impulsions
Description
La classification des données d’impulsion est un processus itératif qui nécessite l’utilisation d’outils logiciels et d’informations auxiliaires pour convertir les données sur les impulsions en catégories de couvertures terrestres. Le processus peut miser sur des routines logicielles automatisées et semi-automatisées de traitement des informations auxiliaires afin de produire des données de nuages de points classifiées. Une évaluation de l’exactitude est ensuite réalisée afin de déterminer si les données ont la qualité voulue. L’évaluation spécifique de la qualité est présentée ci-dessous.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Zone d’essai | Utilisation d’une grille dont la dimension des cellules est de 20 m x 20 m | Validation |
| Exactitude | Un maximum de 2 % des points qui ne sont pas mis de côté (non-withheld) peuvent avoir une erreur démontrable de classification dans la ZI. Comme alternative pour des projets de grandes dimensions, le pourcentage d’erreur peut être en calculé en fonction du nombre de cellules en erreur plutôt qu’en nombre de points. Une cellule est identifiée en erreur lorsqu’une ou des erreurs de classification sont trouvées à l’intérieur de celle-ci. Un maximum de 2% des cellules peuvent avoir une erreur démontrable de classification dans la ZI. |
Validation |
| Évaluation | L’évaluation de la classification devrait être mise à l’épreuve en comparant les points de contrôle au sol et/ou des informations auxiliaires, y compris des orthoimages haute résolution ou tout autre ensemble de données géospatiales. L’échantillonnage devrait être bien réparti dans l’ensemble de la ZI. Au moins 5 cellules par kilomètre carré seront échantillonnées. L’autorité contractante pourrait augmenter les exigences en matière d’échantillonnage. | Validation |
| Autres types d’erreur | Outre l’évaluation de points ou cellules en erreurs, certaines anomalies dans la classification du jeu de données peuvent entraîner un refus des données par l’autorité contractante :
|
Validation |
Considération, limites et postulats
La classification peut être assouplie par l’autorité contractante dans les zones exigeantes.
6.4.6 Vérification de l’exactitude relative
Description
L'exactitude des retours devrait être uniforme dans toutes les parties utilisables d’une fauchée unique ainsi que dans les parties des fauchées qui se chevauchent. Des vérifications de l’exactitude altimétrique relative sont utilisées pour valider la stabilité géométrique de la collecte de données.
Exigences
| Nom | Description | Catégorie |
|---|---|---|
| Exactitude altimétrique relative– Intrafauchée (répétabilité des surfaces lisses et dures) (DQMz) | L’évaluation intrafauchée doit porter sur une seule fauchée et en n'utilisant que les retours uniques dans une zone dépourvue de végétation. L’évaluation sera réalisée sur des surfaces lisses et dures afin de déterminer toute irrégularité altimétrique ne dépassant pas le seuil décrit au tableau 7 de la section 6.2.3. Ce calcul est effectué en utilisant la différence quadratique moyenne dans l’axe des z (DMQz) entre le minimum et le maximum. L’évaluation utilisera une matrice des écarts signés (+/-) ayant des cellules de 2 fois l’ENGI arrondies au nombre entier le plus près. L’échantillonnage se fera dans une zone d’environ 50 m2 à plusieurs endroits dans la fauchée et le long de celle-ci, dans la partie utilisable. Au moins trois zones d’échantillonnage seront établies pour chacune des fauchées dans la ZI. L’autorité contractante pourrait exiger ou réaliser un échantillonnage supplémentaire. La zone d’échantillonnage sera évaluée au moyen d’une matrice différentielle entre l’altitude maximale et minimale pour chacune des cellules. Les écarts dans la matrice ne doivent pas dépasser les valeurs indiquées dans le tableau d'exactitude relative dans la fauchée. |
Acquisition |
| Exactitude altimétrique relative – Interfauchée (différence dans le chevauchement des fauchées – DQMz et écart maximal) | L’uniformité entre les fauchées est évaluée en produisant une matrice quadrillée à partir de retours uniques dans une zone dépourvue de végétaux. La comparaison utilisera une matrice de comparaison des différences signées (+/-) dont les cellules mesureront 2 fois l’ENGI, arrondies au nombre entier le plus près pour chacune des fauchées. L’évaluation sera réalisée en soustrayant l’écart entre les surfaces de la grille. La différence quadratique moyenne dans l’axe des z (DQMz) ainsi que l’écart maximal calculé entre le minimum et le maximum pour les points à la surface de la matrice devraient être égaux ou inférieurs aux seuils présentés dans le tableau 7 de la section 6.2.3. | Acquisition |
Considérations, limites et postulats
Les images matricielles de l’estompage sont utiles pour déceler les anomalies au niveau du processus de traitement des données.
6.5 Produits à livrer
Un rapport de projet détaillé doit être fourni. Ce dernier doit comprendre l’ensemble du contenu assemblé, soit la documentation, les images, les notes et les données créées pour le projet.
6.5.1 Produits à livrer
Reddition de comptes
| Élément | Description | Format |
|---|---|---|
| Planification du projet | Ce document doit contenir les éléments suivants :
|
Microsoft Word ou PDF |
| Rapports d’étape | Lors de l’acquisition des données, des rapports d’étape doivent être fournis à la fréquence indiquée par l’autorité contractante.
|
Microsoft Word ou PDF |
| Produits à livrer | Les rapports qui doivent être fournis en tant que produits à livrer doivent comprendre ce qui suit :
|
Microsoft Word ou PDF |
| Liste d’inventaire des données | Un inventaire de données et un dictionnaire décrivant toutes les données et la documentation recueillies dans le cadre du projet doivent être fournis sous forme de tableau structuré. Ce produit à livrer doit comprendre le nom du fichier, la date de création ainsi que les renseignements propres à la personne-ressource responsable des éléments. | Microsoft Excel ou PDF |
Données recueillies sur le terrain
| Élément | Description | Format recommandé |
|---|---|---|
| Contrôle du levé |
|
RINEX, PDF |
| Vol |
|
Shapefile |
| Validation in situ |
|
Excel RINEX/MS Word-PDF TIFF/JPG PDF/JPG |
| Métadonnées | Des métadonnées seront fournies pour les données de terrain. La structure des métadonnées utilisera le format XML et sera fondée sur la norme ISO 19115:2003. | XML |
Données lidar
| Élément | Description | Format |
|---|---|---|
| Données de nuage de points | Données de nuage de points classifiées dans les tuiles à l’aide de la convention d’appellation. | LAS/LAZ |
| Fichier d’Index | Fichier d’index des données de nuages de points contenant la date, la convention d’appellation, le nom du projet et le lieu de collecte. | Fichier de forme |
| Données brutes | Données à livraison facultative, sauf si l’autorité contractante le demande ou si des données de nuages de points ne sont pas livrées. Le fournisseur doit garder les données brutes originales pendant 6 mois à compter de la date de livraison. | |
| Métadonnées | Métadonnées des données livrées en format XML à l’aide de la norme ISO 19115:2003 – profil nord-américain, et informations supplémentaires sur les acquisitions lidar. | XML (métadonnées) Excel (informations supplémentaires sur les acquisitions lidar) |
Informations supplémentaires sur les acquisitions lidar.
Les informations supplémentaires sur les acquisitions lidar doivent être incluses dans un fichier Excel afin de compléter les métadonnées ISO 19115:2003 – profil nord-américain.
Validation des données
| Élément | Description | Format recommandé |
|---|---|---|
| Distribution spatiale et régularité | Résultats de la vérification des données de distribution des impulsions | Excel et PDF |
| Précision relative | Calcul de l’exactitude relative, y compris de toutes les données utilisées pour :
|
Excel, GeoTiff, PDF |
| Densité de l’impulsion | Grille visuelle et histogramme pour le calcul des résultats de l’application de la grille de densité des impulsions. | GeoTiff |
| Lacunes en matière de données | Résultats de la vérification des vides de données. | Excel, GeoTiff et PDF |
| Classification des impulsions | Résumé des résultats de la classification | Excel, GeoTiff et PDF |
| Précision positionnelle | Résultats de l’exactitude positionnelle, y compris toutes les données utilisées pour l’établissement de l’emplacement des points de vérification verticaux et horizontaux – EAZDV, EAV, EPF et EPC seront fournis | Excel, GeoTiff et PDF |
6.5.2 Données lidar brutes
Les sources de données brutes du projet, comme les fichiers de données lidar de format natif, n’ont pas à être obligatoirement livrées. Toutefois, le fournisseur doit garder une copie de toutes les données brutes pertinentes du projet pendant la période minimale indiquée dans le tableau 21 ou toute autre période convenue entre l’autorité contractante et le fournisseur, après la livraison des produits à livrer dans le cadre du projet. Cette période est considérée comme étant une période d’examen qui vise à s’assurer que toutes les exigences concernant les produits à livrer sont satisfaites. Au cours de cette période, un contrôle de la qualité additionnel peut avoir lieu au besoin, tel que déterminé par l’autorité contractante. Toute lacune au niveau des produits à livrer, du contenu et des données, ou tout écart par rapport aux spécifications du guide d’orientation, pourrait entraîner le rejet des données par l’autorité contractante. Une telle situation nécessiterait la livraison des produits à livrer, le retraitement ou un nouveau survol des zones problématiques dans un délai établi par l’autorité contractante.
6.6 Propriété des données et droit d’auteur
Il est recommandé que le fournisseur livre toutes les données avec droit d’auteur illimité accordant le droit à l’autorité contractante de placer les données dans le domaine public ou de les distribuer comme bon lui semble. L’arrangement spécifique doit être convenu par et le fournisseur. Cette recommandation est fortement encouragée pour toute donnée acquise au moyen de fonds fédéraux.
7.0 Glossaire
95e percentile : Une exactitude établie au 95e percentile indique que 95 % des erreurs altimétriques seront égales ou inférieures à l’exactitude indiquée et que 5 % des erreurs altimétriques seront supérieures. Ce terme est utilisé lorsque les erreurs altimétriques sont susceptibles de ne pas suivre la distribution normale des erreurs (p. ex., dans les zones boisées où la classification des altitudes du sol pourrait avoir un biais positif).
Attitude : Position d’un corps définie par les angles entre les axes du système de coordonnées du corps et les axes d’un système de coordonnées externe. En photogrammétrie, l’attitude est l’orientation angulaire d’une caméra (roulis, tangage et lacet) ou de l’image captée par la caméra, relativement à un quelconque système de référence externe. En ce qui concerne les systèmes lidar, l’attitude se rapporte habituellement au roulis, au tangage et à au cap de l’instrument au moment où une impulsion active est émise du capteur.
Axe de pointage (boresight) : Étalonnage d’un système lidar doté d’une unité de mesure inertielle (UMI) et d’un système mondial de localisation (GPS) pour établir avec précision :
- la position de l’instrument (x, y, z) par rapport à l’antenne GPS ;
- l’orientation (roulis, tangage et cap) de l’instrument lidar par rapport au vol rectiligne et horizontal.
Bonne répartition : En ce qui concerne un ensemble de données couvrant une zone rectangulaire présentant une exactitude positionnelle uniforme, les points de vérification devraient être distribués de façon à ce qu’ils soient espacés à des intervalles d’au moins 10 pour cent de la distance diagonale à l’échelle de l’ensemble de données et à ce qu’au moins 20 pour cent des points soient situés dans chacun des quadrants de l’ensemble de données (adaptation de la NSSDA du Federal Geographic Data Committee, 1998). En ce qui concerne la présente spécification, ces lignes directrices s’appliquent à chacune des classes de couverture terrestre pour lesquelles les points de vérification sont recueillis.
Cassure : Caractéristique linéaire délimitant un changement dans la continuité ou l’aspect lisse d’une surface, notamment des changements abrupts de l’altitude ou un cours d’eau.
Champ de vision (FOV) : Étendue angulaire de la partie de l’objet sondé par un capteur lidar, mesuré en degrés. Pour éviter toute confusion, un capteur lidar aéroporté type ayant un champ de vision de 30 degrés est communément désigné comme ayant un angle de balayage de ±15 degrés de part et d’autre du nadir.
Chevauchement : Pourcentage de chevauchement associé à deux lignes de vol adjacentes. Un chevauchement se produit lorsqu’un aéronef survole la zone du projet pour obtenir une densité de données uniforme et une couverture optimale sous le couvert forestier.
Classification : Classification des retours du nuage de points lidar conformément à une modalité de classification afin d’identifier le type de chacune des cibles produisant un retour lidar. Le processus permet la différenciation future entre les cibles de sols dénudés, les plans d’eau, le bruit, la végétation, les bâtiments, des objets créés par l’homme et tout autre objet d’intérêt.
Densité nominale globale des impulsions (DNGI) : Variante de la densité nominale des impulsions qui exprime la densité totale attendue ou réelle des impulsions dans un secteur donné et découlant de survols multiples de l’instrument de détection et de télémétrie par ondes lumineuses (lidar), ou d’un survol unique d’une plateforme comprenant plusieurs lidars, au-dessus d’un même secteur. À tout autre égard, la DNGI est identique à la densité nominale des impulsions (DNI). Lors d’une collecte de données par passage unique, la DNGI et la DNI seront équivalentes. Remarque :
DNI = 1/ENI2
Dépassement : Parties d’une fauchée qui ne sont pas nécessaires pour assurer une couverture unique, sans chevauchement et sans vides de données par rapport aux fauchées adjacentes. Parties non nobles d’une fauchée. Pour ce qui est des collectes de données misant sur des passages multiples, les excédents sont les parties de la fauchée qui ne sont pas nécessaires à l’obtention d’une couverture complète sans chevauchement aux profondeurs prévues. Dans la spécification LAS version 1.4 (American Society for Photogrammetry and Remote Sensing, 2011), ces points sont identifiés au moyen du bit indicateur incorrectement nommé « chevauchement ». Voir chevauchement, non noble.
Dernier retour : La dernière partie mesurable d’une impulsion lidar retournée.
Données de forme d’onde (forme complète du signal) : Système ou données lidar dans lequel la réflexion complète de l’impulsion laser est entièrement numérisée, captée et stockée. Des nuages de points de retours discrets peuvent être extraits des données de forme d’onde lors du post-traitement.
Distribution spatiale : Dans le créneau des lidars, la distribution spatiale est synonyme de régularité ou d’uniformité de la densité des points au sein d’une collection. Sur le plan théorique, la distribution spatiale idéale pour une collecte de données lidar est un treillis parfait et régulier de points équidistants sur les axes X et Y.
Empreinte de l’impulsion : Section au sol traversée par l’impulsion laser. L’empreinte est fonction de la portée, de l’angle d’incidence, de la pente du sol et de la divergence du faisceau. La distribution énergétique de l’empreinte de l’impulsion est définie par une distribution gaussienne de 1/e ou 1/e2, selon la source utilisée.
Erreur altimétrique : Déplacement de l'altitude consignée d’un élément faisant partie d’un ensemble de données par rapport à son altitude véritable ou plus précise. Cette valeur est habituellement représentée par la valeur Delta (ZD).
Espacement nominal global entre impulsions (ENGI) : Variante de l’espacement nominal entre les impulsions qui exprime la distance latérale type ou moyenne entre les impulsions dans un ensemble de données lidar découlant de survols multiples de l’instrument de détection et de télémétrie par ondes lumineuses (lidar), ou d’un survol unique d’une plateforme comprenant plusieurs lidars, au-dessus d’un même secteur. À tous les autres égards, l’ENGI est identique à l’espacement nominal entre les impulsions (ENI). Lors d’une collecte de données par passage unique l’ENGI et le ENI seront équivalents. Remarque :
Étalonnage : Se rapporte au processus d’identification et de correction d’erreurs systématiques au niveau du matériel, des logiciels ou des procédures. L’étalonnage peut également être défini comme la détermination des erreurs systématiques d’un appareil de mesure en comparant les mesures prises par cet appareil avec les marquages ou les mesures d’un autre appareil jugé correct. Les capteurs aéroportés doivent être étalonnés sur les plans géométrique et radiométrique.
Exactitude : Degré de conformité d’une valeur mesurée ou calculée par rapport à la valeur réelle. L'exactitude se rapporte à la qualité d’un résultat et elle se différencie de la précision, laquelle se rapporte à la qualité de l’opération de laquelle le résultat est obtenu (directives de l’ASPRS en matière d’acquisition).
- Exactitude absolue : Une mesure qui tient compte de toutes les erreurs systématiques et aléatoires dans un ensemble de données. L’exactitude absolue se rapporte à un plan ou à un système de référence défini.
- Exactitude relative : Mesure de la variation sous forme d’exactitude point à point dans l’ensemble de données. Dans le créneau des lidars, ce terme peut signifier spécifiquement la concordance positionnelle entre les points faisant partie d’une fauchée, les fauchées adjacentes d’un même vol, les vols adjacents d’un projet, ou entre projets adjacents.
Exactitude altimétrique : Mesure de l’exactitude positionnelle d’un ensemble de données par rapport à une référence altimétrique spécifiée et à un percentile ou niveau de confiance spécifié. Au niveau de confiance de 95 %, l’exactitude altimétrique est définie comme suit :
Exactitude altimétrique à 95 % = 1,96 x EQMz
Remarque : est l’ensemble de points lidar faisant l’objet de l’évaluation et représente les points de vérification du levé correspondant utilisés pour comparer les points d'altitude lidar (z) à l’emplacement géographique. Le terme n représente le nombre de points de vérification.
- Exactitude altimétrique – zone végétalisée (EAV) : Remplace l’exactitude altimétrique supplémentaire (SVA) et l’exactitude altimétrique consolidée (CVA). Cette mesure constitue une estimation de l’exactitude altimétrique fondée sur le 95e percentile dans les terrains végétalisés où les erreurs n’ont pas une distribution nécessairement normale.
- Exactitude altimétrique, zone dépourvue de végétation (EAZDV) : Remplace l’exactitude altimétrique fondamentale (FVA). L’exactitude altimétrique au niveau de confiance de 95 % en terrain ouvert dépourvu de végétation, où les erreurs devraient suivre une distribution normale.
Exactitude planimétrique fondamentale : Compare les positions planimétriques de points au sol/de vérification bien connus et facilement perceptibles aux positions des points lidar au sol. L’exactitude planimétrique est exprimée en tant qu’erreur quadratique moyenne (EQM) ou en tant qu’erreur au niveau de confiance de 95 % (ASPRS 2014). L’exactitude planimétrique est définie en tant que rayon d’un cercle d’incertitude et suppose une distribution normale. Au niveau de confiance de 95 %, l’exactitude planimétrique radiale est définie comme suit :
Exactitude planimétrique = 1,7308 x EQMr
où
Nota : est l’ensemble de points lidar faisant l’objet d’une évaluation et constitue les points de vérification correspondants utilisés pour comparer les points lidar horizontaux (r) à l’emplacement géographique. Le terme n représente le nombre de points de vérification.
Fauchée : Données résultant d’une seule ligne de vol consacrée à la collecte de données et représentant la largeur totale de la couverture dans la trajectoire de vol du capteur lidar.
Filet : Partie centrale d’une fauchée qui, lorsqu’elle est jumelée aux filets des fauchées adjacentes, forme une couverture complète, unique, sans chevauchement et sans lacune. Dans le cas des campagnes de collecte conçue pour utiliser des couvertures multiples, les filets constituent les parties des fauchées qui sont nécessaires à la création d’images complètes, sans chevauchement et sans lacune à l’étendue de couverture prévue.
Fréquence de répétition de l’impulsion (PRF) : Fréquence des impulsions laser émises. Une PRF élevée entraîne un espacement serré des points au sol, ce qui autorise une caractérisation haute résolution du paysage. Toutefois, puisque la PRF est inversement liée à l’énergie d’impulsion, une PRF élevée pourrait réduire la pénétration du feuillage dans les zones fortement végétalisées.
Grille : Modèle de données géographiques qui représente l’information sous forme de matrice formée de cellules carrées de taille égale. Chaque cellule est désignée par ses coordonnées géographiques ou orthogonales (x/y).
Impulsion : Une impulsion laser est une émission d’énergie électromagnétique produite par une source de lumière cohérente à l’aide d’un laser à une longueur d’onde précise.
Impulsion mise de côté : Dans la spécification relative aux fichiers LAS, un point mis de côté est indiqué par un bit unique indiquant que le point lidar associé est géométriquement anormal ou non fiable et qu’il devrait être ignoré dans le cadre de tous les processus normaux. Ces points sont mis de côté en raison de leur valeur dans les analyses spécialisées. Habituellement, les points mis de côté sont identifiés et étiquetés lors du prétraitement ou par l’utilisation de routines de classification automatiques.
Intensité : Pour ce qui est des instruments lidar à retours discrets, l’intensité correspond à l’amplitude enregistrée de l’impulsion lidar réfléchie au moment où la réflexion est captée en qualité d’écho par l’instrument lidar. Les valeurs d’intensité lidar peuvent être affectées par de nombreux facteurs, comme l'ajustement instantané du contrôle de gain automatique de l’instrument et l’angle d’incidence. L’intensité ne correspond pas à la mesure véritable de l’énergie. Dans les systèmes à forme d’onde complète, la réflexion entière est échantillonnée, ce qui autorise la mesure de l’énergie véritable pour chaque retour ou pour la réflexion globale. Les valeurs d’intensité des retours discrets dérivées d’un système à forme d’onde complète peuvent ou non être étalonnées afin de représenter l’énergie véritable.
LAS : Format de fichier public permettant l’échange de données de nuages de points 3D entre les utilisateurs des données. L’extension du fichier est las.
lidar : Instrument servant à mesurer la distance par rapport à un objet réfléchissant par l’émission d’impulsions minutées de lumière et en mesurant l’écart temporel entre l’émission de l’impulsion laser et la réception de l’impulsion réfléchie. L’écart temporel mesuré pour chaque impulsion est converti en distance laquelle, lorsqu’elle est combinée à la position et à l’attitude extraites du GPS, de l’UMI et de l’instrument lui-même, autorise l’établissement de l’emplacement ponctuel 3D de la cible réfléchissante.
lidar à canaux multiples : Les canaux multiples de données découlant d’un instrument unique sont considérés comme une fauchée unique. En ce sens, un instrument unique est considéré comme un instrument dont les deux canaux satisfont les critères suivants :
- elles partagent des composantes matérielles fondamentales du système, comme le système mondial de localisation (GPS), l’unité de mesure inertielle (UMI), le laser, le miroir ou le prisme, et l’ensemble de détection;
- elles partagent une procédure et une solution commune d’étalonnage ou de visée;
- elles sont conçues pour être exploitées en qualité d’unité de détection unique.
Métadonnées : Toute information qui décrit ou appuie un ensemble de données géospatiales, y compris les fichiers de métadonnées officiellement structurés et formatés, les rapports et autres données connexes.
Modèle numérique d'altitude (MNA) : Représentation numérique d’un relief composé d’une grande quantité de valeurs altimétriques mises en relation avec un plan de référence altimétrique et correspondant à une grille normale de points à la surface de la Terre. Ces altitudes peuvent être des altitudes au niveau du sol ou de surfaces réflectives.
Modèle numérique de terrain (MNT) : Représentation de la surface du sol dénudé et dépourvue de tout objet (végétation et bâtiments, notamment).
Modèle numérique de surface (MNS) : Représentation de la surface de la Terre, y compris de la végétation et des structures fabriquées par l’homme. Le modèle numérique de surface indique la hauteur des végétaux, du couvert forestier et des structures s’élevant au-dessus du plan de référence altimétrique.
Nadir : Point ou ligne se trouvant directement sous la plateforme collectrice, corrigé pour les variations d’attitude. En ce qui concerne les lidars, le nadir correspond à la ligne centrale d’une fauchée.
Niveau de confiance de 95 % : Une exactitude ayant un niveau de confiance de 95 % signifie que 95 % des positions contenues dans l’ensemble de données présenteront une erreur par rapport à la véritable position au sol qui est égale ou inférieure à la valeur d'exactitude indiquée. La valeur d'exactitude indiquée reflète toutes les incertitudes, y compris celles introduites par les coordonnées de contrôle géodésique, la compilation et le calcul final des valeurs des coordonnées au sol dans le produit. Lorsque les erreurs suivent une distribution normale, les exactitudes altimétrique et planimétrique sont dites être au niveau de confiance de 95 % (NDEP 2004).
Nuage de points : Souvent désigné « nuage de points bruts », cet élément est le produit de données principal d’un instrument lidar. Dans sa forme la plus élémentaire, un nuage de points bruts lidar est un ensemble de mesures de la distance et de paramètres d’orientation du capteur. Après le traitement initial, la distance et l’orientation associées à chacune des impulsions laser sont converties en une position dans un cadre tridimensionnel de référence. Ce nuage de points cohérents dans l’espace constitue la base en vue d’un traitement et d’une analyse plus poussés. De façon générale, le nuage de points comprend habituellement le premier retour, le dernier retour et les retours intermédiaires pour chacune des impulsions laser émises. En plus de l’information spatiale, les données d’intensité lidar qui sont retournées comprennent des informations sur la texture et la couleur.
Plan de référence : Ensemble de points de référence à la surface de la Terre à la lumière desquels les mesures de positionnements sont prises. Cet ensemble constitue (souvent) un modèle connexe de la forme de la Terre (ellipsoïde de référence) pour définir un système de coordonnées géographiques. Des plans de référence horizontaux (par exemple, le Système de référence géodésique nord-américain de 1983, Système canadien de référence spatiale (NAD83[SCRS]) sont utilisés pour décrire un point à la surface de la Terre, soit à l’aide d’un système latitude-longitude ou d’un autre système de coordonnées. Un plan de référence altimétrique, par exemple le Système canadien de référence altimétrique de 2013, mesure les altitudes ou les profondeurs. En ingénierie et en dessin, un plan de référence est un point, une surface ou un axe de référence sur un objet auquel des mesures peuvent être comparées.
Point : Le guide définit un point comme étant une impulsion lidar qui a été captée, validée et classifiée.
Point de contrôle : Point arpenté utilisé pour ajuster géométriquement un ensemble de données lidar afin d’établir son exactitude positionnelle par rapport au monde réel. Les points de contrôle sont indépendants des points de vérification d’un même projet, et ils ne peuvent en aucun cas servir de points de vérification.
Point de vérification : Point de levé utilisé pour estimer l’exactitude positionnelle d’un ensemble de données géospatiales à la lumière d’une source indépendante de plus grande exactitude. Les points de vérification sont indépendants des points de contrôle d’un même projet et ils ne peuvent en aucun cas servir de points de contrôle.
Premier retour : Première partie importante mesurable d’un retour d’impulsion lidar. Les premiers retours incluent aussi les retours uniques.
Réseau triangulé irrégulier (TIN) : Structure de données vectorielles qui segmente l’espace géographique en triangles contigus qui ne se chevauchent pas. Dans le domaine du lidar, les sommets de chaque triangle sont des points lidar ayant des valeurs x, y et z. Dans la plupart des applications géographiques, les TIN reposent sur des algorithmes de triangulation de Delaunay dans lesquels aucun point d’un triangle donné ne se trouve dans le cercle circonscrit d’un autre triangle.
Retours discrets : Système ou donnée lidar dans lequel une crête importante dans la forme d’onde est captée et stockée. Chaque crête représente le retour (ou écho) d’une cible différente perceptible dans les domaines vertical ou horizontal. La plupart des systèmes lidar modernes sont capables de capter plusieurs retours distincts produits par chaque impulsion laser.
Sol nu : Données numériques d'altitude du terrain dépourvu de végétation, de bâtiments et de toute autre structure créée par l’homme. Altitude du sol.
Système de navigation par inertie : Ce système est une aide à la navigation qui utilise un système de contrôle informatique, une unité de mesure inertielle (capteurs de mouvement [des accéléromètres] et des capteurs de rotation [des gyroscopes]) jumelés à un système de géolocalisation et de navigation par satellites, comme le Système mondial de localisation, afin de calculer en continu (par navigation à l’estime) la position, l’orientation et la vitesse (direction et vitesse du mouvement) d’un aéronef.
Treillis : Méthode de représentation vectorielle en 3D créée par un ensemble rectangulaire de points espacés à un intervalle d’échantillonnage constant dans les directions x et y par rapport à une origine commune. Un treillis diffère d’une grille en ce sens qu’il représente la valeur de la surface seulement au point de maillage plutôt que l’altitude de la cellule entourant le centroïde d’une cellule de la grille.
Vides de données : Dans le créneau des lidars, un vide de données est une lacune au niveau de la couverture du nuage de points provoquée par la non-réflexion de l’impulsion lidar à la surface, une anomalie ou une défaillance de l’instrument ou du processus de traitement, l’obstruction de l’impulsion lidar ou une mauvaise planification de la collecte en vol. Toute zone égale ou supérieure à (quatre fois l’espacement entre impulsions nominales globales [ENGI]) au carré, mesurée à l’aide des premiers retours seulement est considérée comme étant un vide de données.
Vol : Un vol est un cycle unique décollage-atterrissage d’une plateforme de collecte de données (à voilure fixe ou rotative) dans le cadre d’un projet de collecte de données aériennes, souvent réalisé à l’aide d’un lidar.
8.0 Références
American Society for Photogrammetry and Remote Sensing (ASPRS), 2014, Positional accuracy standards for digital geospatial data – draft revision 7, version 1: American Society for Photogrammetry and Remote Sensing.
American Society for Photogrammetry and Remote Sensing (ASPRS), 2019, LAS specification version 1.4 – R15: Bethesda, Md., American Society for Photogrammetry and Remote Sensing, 47 p.
GeoBC Specifications for LiDAR, version 5.0, Ministère des Forêts, des Terres et de l’Exploitation des ressources naturelles de la Colombie-Britannique, 9 avril 2020.
ICSM LiDAR Acquisition Specifications and Tender Template, Australie, version 1.0. Novembre 2010.
Levés Laser Aéroporté (lidar), Traitement et Livraison des Données Classifiées pour des Territoires Situés Dans la Région de L’Abitibi-Témiscamingue, Ministère de L’énergie et des Ressources Naturelles, 13 juillet 2016.
Lignes directrices concernant les levés GNSS en mode RTK/RTN au Canada, Ressources naturelles Canada, version 1.1, juillet 2013..
Ministère de l’Environnement et du Développement durable des ressources de l’Alberta, General Specification for Acquisition of lidar Data, mars 2015.
Modèle numérique d'élévation de haute résolution (MNEHR) - Série CanÉlévation – Spécification de produit, édition 1.3, Ressources naturelles Canada, 28 août 2019.
National Network of Regional Coastal Monitoring Programmes of England, Specification for LiDAR Surveys Version 1.0. Août 2015.
New Zealand National Aerial LiDAR Base Specification, Land Information New Zealand, décembre 2016.
Ontario Specifications for LiDAR Acquisition version 1.1. Gouvernement de l’Ontario, 15 avril 2016.
Province of New Brunswick Draft LiDAR Specifications, Government of New Brunswick, June 2016.
Provision of LiDAR Services for The Government of Manitoba Water Management, Planning and Standards Service Area: Souris River Basin Term: To March 31, 2017.
Ressources naturelles Canada, Directive canadienne pour l’acquisition de données avec le lidar aéroporté, version 1.0, 1er mai 2014.
Spécifications relatives à l’assurance de la qualité et à l’acquisition de données lidar de la Nouvelle-Écosse, version 1.0, Spatial energistics group, 11 avril 2012.
USGS, 2020, 3DEP LiDAR base specification 2020 rev. A, August 2020): NGL Standards and Specification, 48 p.
Webster, T. (2020) Applications of topo-bathymetric LiDAR to flood risk assessment. Technical report prepared for NRCan, 33 p.
9.0 Historique des révisions
Version 3.1
- Mise à jour approfondie de l’Appendice 1 – Foresterie.
- Multiples corrections d’erreurs typographiques et reformulations.
- Ajouts de signets pour une navigation plus rapide dans le document.
- Reformulation de la description d’une classe au Tableau E4 de l’Appendice 5 (version française seulement).
Version 3.0
- Ajout de l’appendice 5 concernant l’acquisition par lidar topo-bathymétrique.
- Dans les appendices 1, 2 et 4, les recommandations d’exactitude et de densité qui étaient moins exigeantes que le Niveau de qualité canadienne (NQC1) ont été modifiées pour y satisfaire.
- Dans les appendices 1, 2 et 4, ajout d’explications sur l’utilisation des valeurs recommandées dans les formules génériques du guide.
- Toutes les mentions de premiers et uniques retours (first and only) ont été changées pour premiers retours.
- Modification de la formule d’exactitude altimétrique en zone végétalisée (95e percentile) et par conséquent, ajustement de la valeur recommandée pour le NQC1.
- Ajout de la mention que les zones sans données jugées acceptables doivent être exclues de l’évaluation de la densité.
- Modification de la résolution de la grille de répartition lors de l’évaluation de la régularité (suppression de l’exigence d’arrondir à l’entier supérieur).
- Correction d’une erreur dans les décimales de la formule d’exactitude planimétrique.
- Correction d’une erreur pour l’exemple de l’exactitude planimétrique (95%) du Niveau de qualité canadienne (NQC1) dans le tableau 1.
- Modification de la valeur d’exactitude planimétrique calculée (EPC) pour que celle-ci soit équivalente à l’erreur quadratique planimétrique moyenne (EQMR). Par conséquent, ajustement de la valeur recommandée pour le NQC1.
- Ajout d’indications que l’utilisation de corrections PPP dérivées de satellite est autorisée.
- Reformulation de l’exigence d’exactitude des points de vérification.
- Ajout d’une alternative non-basée sur le nombre de points en erreurs pour l’évaluation de la classification de projets de grandes dimensions.
- Ajout de nouveaux types d’erreurs de classification pouvant entraîner un refus des données.
- Ajout de la mention que seuls les points mis de côtés (withheld) peuvent être assignés à la classe 0 dans le nuage de points final.
- Dans la version française, correction dans l’exemple donnée pour la convention d’appellation des fichiers lidar.
- Pour la convention d’appellation des fichiers lidar, ajout de la mention indiquant de ne pas insérer de niveau de qualité si l’acquisition est plus dense ou précise que NQC1.
- Mise à jour des versions/éditions des documents de référence.
Version 2.0
- Ajout de formules génériques pour déterminer les exigences d’exactitude et de densité des acquisitions lidar. Le NQC1 reste le standard minimum au Canada et est utilisé comme exemple pour l’utilisation des formules génériques. L’ajout des formules génériques permet une plus grande flexibilité pour établir des spécifications d’acquisition plus denses et/ou plus précises.
Appendice 1 – Foresterie
Introduction
La détection et télémétrie par ondes lumineuses (lidar) aéroportée, une technologie aussi appelée « balayage laser aéroporté » ou « BLA », est devenue un outil important permettant l’acquisition simultanée de données tridimensionnelles sur la structure verticale des écosystèmes forestiers et sur la morphologie des terrains. Les données lidar sont utilisées dans le cadre d’un éventail d’applications relatives aux ressources naturelles, plus particulièrement aux biens et services liés ou non à la fibre de bois (p. ex., bois de charpente, habitats fauniques, qualité de l’eau, loisirs). Les données sont utiles pour estimer des paramètres biophysiques (p. ex., hauteur, volume, biomasse forestière, densité de la végétation), les indicateurs de diversité biologique (p. ex., couvert forestier, assemblages structurels, caractérisation des habitats riverains) et les indicateurs de l’état et de la productivité des écosystèmes (p. ex., structure post-perturbations, trouées dans la canopée, prévisions de croissance et de rendement). Les applications en inventaire forestier du lidar sont typiquement axées sur une approche par régions ou par arbres individuels. Bien que l’approche axée sur les régions (Næsset, 2002) soit considérée comme étant opérationnelle dans un contexte d’inventaire forestier, les approches axées sur les arbres individuels (ITA; p. ex., Hyyppä et Inkinen, 1999) continuent à être développées en raison des complexités inhérentes à la délimitation réussie des couronnes individuelles. Le lidar peut aussi être utilisé pour obtenir une cartographie précise de la surface du sol sous le couvert forestier. Le modèle numérique de terrain (MNT) du sol nu ainsi dérivé est utile pour un vaste éventail d’applications (p. ex., ingénierie forestière, modélisation hydrologique, cartographie des sols).
Les renseignements fournis dans la présente annexe représentent les recommandations actuelles portant sur les spécifications minimales liées à l’acquisition de données lidar aéroportée pour des applications en foresterie. Des interactions complexes sont présentes entre les paramètres d’acquisition, ainsi qu’entre les impulsions laser, l’environnement forestier ciblé et la complexité de la topographie. Celles-ci nécessitent l’évaluation holistique des spécifications et leur adaptation aux besoins d’information particuliers d’un projet. De plus, ces lignes directrices n’ont pas pour but d’être prescriptives; la technologie des capteurs évolue rapidement et les besoins d’information propres aux projets varient et doivent être pris en compte.
Remarque : Actuellement, les données lidar en mode linéaire à retour discret, les données lidar à forme d’onde complète discrétisée et, plus récemment, les données lidar à photon unique ou à comptage de photons sont utilisées dans les applications en milieu forestier. Les recommandations décrites dans cette annexe concernent uniquement les données lidar en mode linéaire et les données lidar à forme d’onde complète discrétisée, les spécifications quant aux lignes de vol ainsi qu’aux données de nuage de points prétraitées étant semblables. Pour de plus amples renseignements concernant les données lidar à photons uniques, White et coll. (2021a) et White et coll. (2021b) évaluent en détail l’utilisation de ces données pour la caractérisation du terrain et la mise en œuvre opérationnelle de l’inventaire forestier amélioré à l’aide d’une approche axée sur les régions, respectivement. Pour obtenir un guide pour l’élaboration et l’application de modèles pour la génération d’un inventaire forestier amélioré par l’emploi des données lidar et d’une approche axée sur les régions, voir les travaux de White et coll. (2013 et 2017).
Considérations relatives aux données
Les données lidar doivent être acquises de manière cohérente sur l’ensemble du jeu de données pour produire des dérivés (métriques, prédictions, modèles de surface) robustes. La distribution spatiale des points utilisables (retours lidar) doit donc être uniforme et sans regroupement, avec des densités d’impulsions consistantes dans toute la zone du projet. En fin de compte, l’uniformité de la distribution de l’échantillonnage dans la zone cible est un indicateur important de la qualité des données et aide à évaluer leur adéquation à l’utilisation. De nombreux facteurs ont une incidence sur la distribution des retours d’impulsion dans un jeu de données lidar (p. ex., les caractéristiques et le paramétrage de l’instrument, le terrain, les turbulences, les conditions environnementales, la structure de la végétation). Le tableau A1 fournit quelques directives concernant les plages de densité d’impulsions minimale selon les différents types de forêts canadiennes. Les principales considérations relatives aux données sont listées ci-dessous:
- L’utilisation de plusieurs modèles ou générations de capteurs dans le cadre d’un même projet est déconseillée puisque les spécifications optimales d’acquisition (divergence du faisceau, longueur d’onde, capacité de numérisation du retour, etc.) varieront inévitablement d’un capteur à l’autre. Cela entraînera ainsi un manque d’uniformité dans l’ensemble de données agrégées qui en résultera et aura une incidence sur toute utilisation ultérieure des données. Il est conseillé d’utiliser des capteurs ayant des caractéristiques et paramétrages similaires avec des paramètres de vol coïncidents pour les acquisitions de données à l’appui d’un projet donné.
- Les systèmes lidar utilisant un système à miroirs coniques, rotatifs ou à mouvement de nutation permettent d’obtenir des patrons d’échantillonnage uniformes dans l’ensemble de la fauchée échantillonnée, et minimisent donc les espacements irréguliers dans l’échantillonnage, notamment à l’extrémité de la fauchée. Les espacements irréguliers dans l’échantillonnage peuvent être considérablement réduits grâce à un chevauchement de 50 % avec les systèmes à miroirs oscillants. De plus, certains systèmes à miroirs oscillants sont équipés d’une technologie offrant un champ de vision dynamique. La technologie maintient une largeur fixe des fauchées tout en préservant la distribution régulière des points, et ce, malgré les variations de hauteur du terrain.
- Des lignes de vol adjacentes opposées peuvent augmenter le nombre de configurations à partir desquelles la forêt est échantillonnée, bien qu’elles ne soient pas exigées pour l’utilisation de systèmes de balayage conique en raison des deux perspectives du sol obtenues dans une seule ligne de vol.
- La structure des environnements forestiers ciblés peut être utilisée pour guider la limite de l’angle de balayage. Par exemple, il a été démontré que l’utilisation d’un angle de balayage plus grand n’a aucune incidence sur l’estimation des attributs forestiers pour les couverts ouverts ou les couverts composés de couronnes coniques sur un terrain relativement uniforme, à condition qu’un chevauchement suffisant (c.-à-d. au moins 20 %) soit maintenu entre les lignes de vol (p. ex., ± 30° pour les peuplements dominés par le sapin baumier; van Lier et coll., 2021). En effet, bien qu’un angle de balayage plus grand produise une largeur de fauchée plus importante, la probabilité d’obtenir des retours au sol diminue à l’extrémité de la fauchée, notamment dans les environnements forestiers denses et complexes. Dans les environnements à terrain ouvert et aux forêts clairsemées, un angle de balayage plus large aura une moindre incidence sur l’espacement nominal des retours au sol.
- Les exigences doivent prendre en compte le type de terrain, la complexité de la structure forestière échantillonnée ainsi que les produits d’information dérivés souhaités et leur échelle.
- La densité d’impulsions doit être suffisante pour caractériser de manière fiable les environnements d’intérêts dans toute la zone du projet. Une densité d’impulsions élevée permet un échantillonnage plus complet du couvert forestier, augmente la probabilité d’obtenir des retours au sol et renforce la confiance dans l’identification des retours au sol dans les zones forestières, en particulier dans les environnements complexes. La majorité des capteurs fabriqués au cours des dernières années atteignent, et le plus souvent dépassent, le minimum recommandé de deux impulsions par mètre carré, même aux altitudes de fonctionnement les plus élevées. En règle générale, la densité d’impulsions requise augmente en fonction de la complexité de l’environnement forestier échantillonné ou du terrain associé.
- L’acquisition de données réalisée à l’automne ou tôt au printemps, lorsque les arbres des forêts décidues n’ont pas de feuilles et lorsque le sous-étage et autres couverts végétaux sont en dormance, réduira l’espacement nominal des retours au sol, ce qui permettra d’obtenir une caractérisation plus précise du terrain et par conséquent un MNT de meilleure qualité. En revanche, l’acquisition de données lorsque les arbres portent des feuilles peut mener à une caractérisation améliorée de la structure forestière, bien que la nécessité des données « avec feuilles » et « sans feuilles » dépende du type de forêt et des besoins en matière d’informations. White et coll. (2015) fournissent un résumé de la documentation qui explore l’utilisation des données « avec feuilles » et « sans feuilles » selon une approche axée sur les régions. Il convient toutefois de noter que la combinaison de données avec et sans feuilles dans le cadre d’un même projet est vivement déconseillée, puisque le changement de structure forestière peut exiger des efforts d’échantillonnage et de modélisation supplémentaires pour obtenir des produits cohérents.
- Une grille réalisée au moyen d’un MNT dont la résolution spatiale est inférieure ou égale à 2 m convient pour la normalisation de la hauteur du nuage de points. Une résolution plus fine peut être nécessaire pour les terrains extrêmement escarpés.
| Région forestièreNote de bas de page 1 | Caractéristiques | Densité d’impulsions minimale selon l’approche axée sur les régionsNote de bas de page 2 | Densité d’impulsions minimale selon l’approche axée sur les arbres individuels |
|---|---|---|---|
| Boréale; acadienne | Forêts principalement composées de conifères comportant des secteurs mixtes ayant des arbres décidus, particulièrement dans les zones riveraines. Les forêts septentrionales se caractérisent par des couverts clairsemés et ouverts, des arbres de taille décroissante et un faible relief, tandis que les forêts méridionales se caractérisent par des couverts denses et ouverts à fermés et une topographie ondulante ou vallonnée. | 2-4 imp/m2 | 6-8 imp/m2 |
| Forêts décidues; Grands Lacs – Saint-Laurent | Forêts principalement composées de feuillus et secteurs mixtes comprenant des conifères à couvert dense et fermé; topographie vallonnée à faible relief. | 2-4 imp/m2 | 4-8 imp/m2 |
| Forêts montagnardes, côtières, colombiennes et subalpines | Forêts à couvert clairsemé et ouvert en haute altitude, mais dense et fermé en basse altitude; topographie essentiellement montagneuse au relief élevé. | 6-12 imp/m2 | 6-12 imp/m2 |
Remarque : la densité d’impulsions requise augmente en fonction de la complexité de l’environnement forestier ou du terrain.
Considérations relatives à l’acquisition de paramètres
Les capteurs lidar peuvent être configurés de manière à être optimisés pour les applications en milieu forestier. Les paramètres choisis pour les applications en milieu forestier dépendent des objectifs du projet et des besoins connexes en information. Le tableau A2 présente un résumé des paramètres d’acquisition recommandés en fonction des connaissances scientifiques actuelles et des capteurs disponibles. Aucun paramètre ne peut être évalué seul, puisque de nombreux paramètres dépendent les uns des autres (p. ex., l’augmentation de la fréquence de répétition des impulsions augmentera la densité d’impulsion, tandis que l’augmentation de l’altitude de vol la diminuera). Des recommandations détaillées concernant les données lidar adaptées à l’approche axée sur les régions sont également présentées dans White et coll. (2013).
Les recommandations ci-dessous doivent être considérées comme des exigences minimales absolues. La recherche d’un avis expert auprès d’un fournisseur de services concernant les paramètres appropriés selon les conditions forestières et besoins propres au projet envisagé doit toujours être entreprise. En règle générale, les utilisateurs finaux devraient porter une attention particulière à la densité d’impulsion, au chevauchement des lignes de vol, à l’angle de balayage et au moment d’acquisition des données (« avec feuilles » et « sans feuilles »).
| Paramètre d’acquisition | Recommandation | Éléments à considérer |
|---|---|---|
| Divergence du faisceau laser | Entre 0,1 et 0,6 mrad | La dispersion angulaire de l’impulsion laser et l’altitude de vol auront une incidence sur la taille de l’empreinte de l’impulsion laser au sol (p. ex., une divergence du faisceau de 0,5 mrad à une altitude de 1 000 m produira une empreinte d’environ 50 cm de diamètre). |
| Angle de balayage | L’angle de balayage maximal est de ≤ 25° à partir du nadir; un angle de ≤ 20° est toutefois recommandé. | Des angles de balayage plus étroits favorisent la pénétration dans le couvert forestier, permettent des empreintes plus petites et augmentent l’énergie de l’impulsion incidente. |
| Chevauchement de fauchées | Minimum de 20 %; un chevauchement de 50 % est toutefois recommandé. | Une double couverture à la hauteur prévue de l’aéronef au-dessus du sol peut être réalisée en assurant un chevauchement de 50 % entre les fauchées, ce qui permet un double échantillonnage de la cible lors de l’utilisation de balayeurs à miroirs oscillants, rotatifs ou à mouvement nutation, réduisant ainsi le risque de vides de données. Bien que les supports gyrostabilisés atténuent le risque de vides de données entre les lignes de vol, un chevauchement minimum de 20 % entre les fauchées est recommandé pour éliminer le risque de vides de données entre les parties utilisables des fauchées. Lorsque le chevauchement est inférieur à 20 %, il y a un risque accru de vides de données entre les fauchées. |
| Fréquence de répétition des impulsions | 50 kHz ou plus (systèmes actuels > 400 kHz) | Une fréquence de répétition plus élevée permet de survoler la région plus rapidement tout en maintenant des densités de points similaires. |
| Retours d’impulsions | Au moins 4 retours potentiels par impulsion | Il convient de noter que 5 retours sont bien en deçà de la capacité des capteurs lidar actuels. |
| Conditions environnementales | Ciel dégagé Absence de neige |
Les conditions atmosphériques doivent être favorables, c.-à-d. il ne doit pas avoir de nuages, de brouillard, de brume ou de fumée entre l’avion et le sol. Le sol doit être exempt de neige et ne doit pas avoir subi d’inondations prolongées. Voir la section 6.2.1 (Conditions) du Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté pour plus amples détails sur les considérations relatives aux conditions d’acquisition. |
| Exactitude altimétrique d’une fauchée à l’autre | ± 0,08 m (EQMz) | Un écart de ± 0,05 à 0,25 m en z d’une fauchée à l’autre est acceptable, selon les objectifs du relevé. |
| Exactitude altimétrique | ± 0,1 m (EQMz) | L’interaction entre le laser et le couvert forestier aura une incidence sur l’exactitude altimétrique en zone végétalisée (EAV) sous le couvert forestier. Par conséquent, une erreur relative sur z allant jusqu’à ± 0,50 m est acceptable, selon les objectifs du levé. |
| Exactitude planimétrique | ± 0,35 m (EQMR) | Erreur relative de ± 0,5 à 1 m en x et y, selon les objectifs du levé. Difficile à quantifier, elle est souvent établie en fonction de la documentation du fabricant. |
- Pour établir toutes les spécifications relatives à la densité des données lidar acquises dans le cadre d’un projet donné, une valeur comprise dans la plage de densité d’impulsion associée à l’application et au type de forêt appropriés peut être utilisée comme densité nominale globale des impulsions (DNGI) dans les formules génériques des sections 5 et 6 du Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté.
- Pour établir toutes les spécifications relatives à l’exactitude des données lidar acquises dans le cadre d’un projet donné, les valeurs d’exactitudes altimétrique (EQMz) et planimétrique (EQMR) recommandées dans le tableau ci-dessus peuvent être utilisées dans les formules génériques des sections 5 et 6 du Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté. Un processus documenté de contrôle et de vérification de la qualité doit être inclus dans la livraison des données.
- Les capteurs lidar actuels ont des taux de répétition élevés qui fournissent des densités d’impulsion adéquates. La configuration du taux de répétition du capteur devrait être grandement déterminée par les paramètres de vol, la DNGI à la conception, l’angle de balayage, le chevauchement des fauchées pour éviter les vides de données et une énergie d’impulsion suffisante pour éviter l’affaiblissement des signaux.
- Les levés lidar devraient être conçus et réalisés avec l’objectif de ne pas comporter de vides de données, sauf dans les zones où des conditions de faible réflectance de surface dans le proche infrarouge sont présentes, comme les plans d’eau. La distribution spatiale des points géométriquement utilisables devrait être uniforme et régulière, sauf dans les zones comprenant des vides de données. Une densité d’impulsion minimale spécifiée, telle que recommandée dans le tableau A1 ou définie par les objectifs du projet, devrait être présente dans 90 % des cellules d’une grille de densité uniforme dans une partie utilisable de la fauchée. Voir la section 6.1.1 (Méthode du Projet du Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté) pour de plus amples détails sur les éléments à prendre en considération dans le cadre de la planification de l’acquisition des données.
- Une classification minimale recommandée du nuage de points lidar devrait effectuée pour l’application en foresterie, conformément à la spécification et au format de la norme ASPRS LAS 1.4 – R15. La classification devrait être uniforme à l’échelle du projet et ne devrait contenir aucune variation perceptible de la nature, de texture ou de la qualité de la classification entre les tuiles, les fauchées, les vols ou toute autre division non naturelle. L’exactitude de la classification devra satisfaire le Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté (section 4). Les impulsions étalonnées non classifiées (classe 0 – Créé, jamais classifié) seront classées et assignées à la classe 2 pour le sol nu, à la classe 7 pour les points bas (bruit) et à la classe 18 pour les points hauts. Les valeurs aberrantes, les données d’impulsion géométriquement instables et les fautes seront identifiées au moyen de l’indicateur « mis de côté » et ne seront pas utilisées dans le processus de classification. Le nuage de points restant sera classé dans la classe 1 – Traité mais non classifié. Les autres exigences relatives à la classification dépendront des exigences particulières du projet. Celles-ci pourraient notamment inclure la classe 3 pour la végétation basse, la classe 4 pour la végétation moyenne, la classe 5 pour la végétation haute et la classe 9 pour l’eau.
Références
J. Hyyppä, M. Inkinen. 1999. « Detecting and estimating attributes for single trees using laser scanner. » The Photogrammetric Journal of Finland, 16 (2):27-42.
Laes, D., Reutebuch, S., McGaughey, B., Maus, P. Mellin, T., Wilcox, C., Anhold, J., Finco, M., Brewer, K. 2008. « Practical LiDAR acquisition considerations for forestry applications. » RSAC-0111-BRIEF1, Salt Lake City, Utah, US Department of Agriculture, Forest Service, Remote Sensing Applications Center. 32 p.
Næsset, E. 2002. « Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. » Remote Sensing of Environment, 80(1):88-99.
Rowe, J.S. 1972. Les régions forestières du Canada. Pêches et Environnement Canada, Service canadien des forêts, siège social, Ottawa. 172 p.
van Lier, O.R., Luther, J.E., White, J.C., Fournier, R.A., Côté, J.-F. 2021. « Effect of scan angle on ALS metrics and area-based predictions of forest attributes for balsam fir dominated stands. » Forestry: An International Journal of Forest Research, cpab029.
White, J.C., Wulder, M.A., Varhola, A., Vastaranta, M., Coops, N.C., Cook, B.D., Pitt, D., Woods, M. 2013. Guide des meilleures pratiques pour générer des attributs d’inventaire forestier provenant de données obtenues par balayage laser aéroporté en utilisant une approche par zones. Rapport d’information FI-X-010. Service canadien des forêts, Centre canadien sur la fibre de bois, Centre de foresterie du Pacifique, Victoria (Colombie-Britannique) Canada. 50 p.
White, J.C., Arnett, J.T.T.R., Wulder, M.A., Tompalski, P., Coops, N.C. 2015. « Evaluating the impact of leaf-on and leaf-off airborne laser scanning data on the estimation of forest inventory attributes with area based approach. » Canadian Journal of Forest Research, 45:1498-1513.
White, J.C., Tomplaski, P., Vastaranta, M., Wulder, M.A., Saarinen, N., Stepper, C., Coops, N.C. 2017. Guide pour l’élaboration et l’application de modèles en vue de l’établissement d’un inventaire forestier amélioré par l’emploi de données de balayage laser aéroporté et d’une analyse axée sur les régions. Rapport d’information FI-X-018. Ressources naturelles Canada, Service canadien des forêts, Centre canadien sur la fibre de bois, Victoria (Colombie-Britannique) Canada, 38 p.
White, J.C., Woods, M., Krahn, T., Papasodoro, C., Belanger, D., Onafrychuk, C., Sinclair, I. 2021a. « Evaluating the capacity of single photon lidar for terrain characterization under a range of forest conditions. » Remote Sensing of Environment, 252, 112169.
White, J.C., Penner, M., Woods, M. 2021b. « Assessing single photon LiDAR for operational implementation of an enhanced forest inventory in diverse mixedwood forests. » Forestry Chronicle, 97, p. 78-96.
Appendice 2 – Cartographie des zones inondables
Introduction
Les données lidar sont considérées comme étant la source principale de données des modèles numériques d'altitude (MNA) pour les diverses applications de cartographie des zones inondables, y compris des produits techniques spécialisés tels les cartes des zones inondables, les cartes indiquant les dangers et les risques d’inondation, et les cartes d’information publiques. L’objectif principal des applications lidar destinées à la cartographie des zones inondables est d’obtenir des données altimétriques précises, lesquelles sont nécessaires tant pour la modélisation hydraulique (dérivation de l'altitude des eaux et de l’étendue des inondations de diverses ampleurs) que pour la composante cartographique des projets visant les zones inondables. Les ensembles de données d’altitude comprennent ce qui suit :
- Des données d’altitude du terrain qui sont obtenues des derniers retours lidar et qui ne contiennent que des éléments topographiques. Ces données constituent ce qu’on appelle habituellement un modèle numérique de terrain (MNT).
- Des données d’altitude basées sur les premiers retours et qui comprennent les structures (p. ex., bâtiments et ponts) et le couvert végétal constituent ce qu’on appelle habituellement un modèle numérique de surface (MNS).
Les données lidar servent également à faciliter la caractérisation des zones inondables (p. ex., extraction de caractéristiques planimétriques ou de la carte de base utiles pour l’orientation de la modélisation hydraulique et la création de cartes des zones inondables, comme des routes et des secteurs pavés, des berges, des ponts, des tranchées, etc.). L’utilisation d’un système lidar en combinaison avec des orthophotos constitue la meilleure solution pour caractériser les zones inondables. Le niveau de détail de la caractérisation des zones inondables devrait être adapté à l’échelle de la cartographie souhaitée (p. ex., un niveau accru de détails sera nécessaire pour une carte à l’échelle 1:2 000 par rapport à une carte à l’échelle 1:5 000).
Considérations relatives à l’acquisition de données
Conditions de faible débit
Outre les conditions environnementales qui doivent habituellement être réunies pour recueillir des données lidar (exemption de neige ou de glace au sol, côtes et cours d’eau sans amoncèlements de glace importants, absence de débordements ou d’inondations inhabituels), la collecte de données lidar aux fins de cartographie des zones inondables devrait avoir lieu lors de conditions d'étiage (saison sèche) afin de maximiser la partie exposée des cours d’eau et, du coup, de maximiser l’utilité des données recueillies aux fins de modélisation hydraulique.
Niveaux et débits stables
Le débit et le niveau de l’eau présents dans les plans d’eau et les cours d’eau devraient demeurer stables (c.-à-d., exempts de variations importantes tout au long de la campagne de collecte de données afin de maximiser l’uniformité des données recueillies). Cet aspect est important dans les situations où le débit/le niveau des eaux risque de changer rapidement (p. ex., les rivières qui réagissent rapidement ou les rivières régularisées). Lorsque la collecte de données s’étend sur une longue période (habituellement en raison de la taille de la zone visée par la collecte, laquelle pourrait potentiellement nécessiter plusieurs saisons), la préférence devrait être accordée à la collecte de données dans des conditions similaires de niveau et de débit d’eau.
Absence de feuilles dans les arbres
Il est recommandé de procéder à la collecte des données lorsque les arbres ne portent aucune feuille et ce, afin d’optimiser la pénétration dans le couvert forestier et maximiser la densité des points au sol et la qualité du MNT connexe. Toutefois, l’acquisition de données en l’absence de feuilles dans les arbres n’est pas requise tant et aussi longtemps que la densité des points et l’exactitude altimétrique des retours sans canopée suffisent à satisfaire les exigences d'exactitude des MNT et des MNS. Dans certaines situations, l’acquisition de données alors que les arbres sont en feuilles peut être préférée ou nécessaire pour cartographier et caractériser les types de végétation, notamment pour la modélisation hydrologique ou la modélisation hydraulique détaillée (p. ex., estimation du n de Manning).
Paramètres d’acquisition
Le tableau B1 résume les paramètres minimaux requis et recommandés pour l’acquisition de données lidar pour les applications de cartographie de zones inondables. Un chevauchement de fauchée plus important est recommandé pour les secteurs qui comportent des terrains à fort relief.
| Paramètres d’acquisition | Minimum | Recommandés |
|---|---|---|
| Chevauchement de fauchée – Chevauchement entre les portions géométriquement utilisables des fauchées (95 % de la largeur de la fauchée) | 20 % | 50 % |
| Champ de vision (FOV) | ± 25 degrés du nadir | ± 20 degrés du nadir |
| Nombre de retours | ≥ 2 | ≥ 3 |
| Intensité | Oui | Oui |
Acquisition d’orthophotographies
Les images aériennes, particulièrement les orthophotographies, sont extrêmement utiles pour la cartographie des zones inondables puisqu’elles fournissent de précieuses informations pour les analyses hydrologiques, hydrauliques et des risques. De plus, elles constituent des ensembles de données cartographiques de base très utiles pour tous les types de cartes des zones inondables. Les orthophotographies sont aussi indispensables pour le conditionnement hydrologique des MNT, ce qui constitue une pratique recommandée pour le post-traitement de MNA dérivés de lidar (voir ci-dessous). Si un nombre suffisant d’orthophotographies à jour et de haute qualité ne sont pas disponibles pour la zone visée par la collecte de données lidar, il incombe de songer à recueillir des orthophotographies au cours de la même période d’acquisition de données lidar afin de maximiser l’utilisation des données aux fins de la cartographie des zones inondables.
Considérations relatives à la qualité des données
Exactitude et densité des données
Les zones inondables peuvent présenter divers types de couvertures terrestres, qu’il s’agisse de végétation dégagée et basse, de broussailles, de forêts et même d’éléments urbains. L’acquisition de données lidar dans les zones inondables est donc assujettie à une multitude de conditions. Celle-ci devrait donc être guidée par le besoin de recueillir suffisamment de retours d’impulsions pour tous les types de couvertures présentes dans la zone inondable. Par exemple, si une portion de la zone visée par la collecte de données est couverte d’une dense végétation riveraine, une densité de collecte plus élevée pourrait être requise pour obtenir une densité de points au sol suffisante dans la zone riveraine.
L’ampleur de l’effort déployé pour colliger les données (densité des points, exactitude altimétrique et exactitude planimétrique) devrait généralement refléter les exigences de l’application prévue de cartographie des zones inondables, laquelle dépend généralement de l’ampleur des risques d’inondation et du cadre réglementaire en place. Le tableau B2 présente les spécifications approximatives recommandées en lien avec la densité et l’exactitude des données lidar pour les applications de cartographie des zones inondables. Ces spécifications respectent l’exigence minimale pour l’acquisition de données lidar aéroporté au Canada (NQC1) et sont établies en fonction de la catégorie de risque d’inondation, selon l’examen des lignes directrices provinciales et territoriales existantes (Alberta Environment, 2011; Kerr Wood Leidal, 2011; Spatial Energistics Group, 2012; Elevation Coordination and Consultation Committee, gouvernement de l’Ontario, 2016) et du National Floodplain Mapping Assessment report présenté par MMM Group Limited (2014). Les catégories de risques d’inondation sont définies à la lumière du rapport de MMM et sont similaires aux classes d’exactitude altimétrique adoptées dans les lignes directrices de l’Ontario :
- Catégorie de risque élevé d’inondation : Toutes les zones urbaines et rurales qui sont protégées par des digues.
- Catégorie de risque moyen d’inondation : Toutes les autres zones rurales qui comprennent les zones de peuplement et les terres agricoles.
- Catégorie de risque faible d’inondation : Zones faiblement peuplées.
| Catégorie de risque d’inondation | |||
|---|---|---|---|
| Élevé | Moyenne | Faible | |
| Exactitude altimétrique (surfaces ouvertes, de niveau et dures) | |||
| Exactitude altimétrique, zones dépourvues de végétaux (EAZDV) – Erreur quadratique moyenne altimétrique (EQMZ) | 5,0-7,5 cm | 7,5-10,0 cm | 10,0 cm |
| Exactitude altimétrique, zones dépourvues de végétaux (EAZDV) – niveau de confiance de 95 % (≈ 1,96 * EQMZ) | 10-15 cm | 15-19,6 cm | 19,6 cm |
| Exactitude planimétrique (surfaces ouvertes, de niveau et dures) | |||
| Erreur quadratique moyenne planimétrique (EQMr) | 11-15 cm | 30-35,1 cm | 35,1 cm |
| Exactitude planimétrique – niveau de confiance de 95 % (≈ 1,7308 * EQMr) | 20-25 cm | 50-60 cm | 60 cm |
| Densité des données | |||
| Densité nominale globale des impulsions (DNGI) | 4-10 imp./m2 | 2-4 imp./m2 | 2 imp./m2 |
Les spécifications d’exactitude et de densité à utiliser sont fonction de la catégorie de risque d’inondation. Pour déterminer la catégorie de risque, se référer aux définitions ci-hautes. Une fois la catégorie identifiée, des valeurs comprises dans les plages de valeurs d’exactitudes altimétrique (EQMz) et planimétrique (EQMR) et de densité (DNGI) du tableau ci-haut peuvent être utilisées dans les formules génériques des sections 5 et 6 du Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté.
Classification
Les classes minimales requises comprennent les suivantes : sol, non-sol, tabliers de pont et eau. Ces classes sont nécessaires pour le conditionnement hydrologique des MNT. Les classes bâtiments et autres structures fabriquées par l’homme seront également requises pour créer des MNS, et pour faciliter la suppression des retours d’immeubles/de structures du MNT. Il est recommandé qu’au moins 90 à 95 % des bâtiments et des structures soient retirés des MNT. De plus, les catégories de végétation pourraient être nécessaires pour la modélisation hydrotechnique et la cartographie de base.
Aplanissement des étendues d’eau
L’aplanissement des étendues d’eau est un post-traitement appliqué aux MNA dérivés de données lidar et qui s’assure que les surfaces aquatiques sont planes dans l’axe des deux rives (perpendiculaire à la direction apparente du courant), sans accroissement vers l’aval. Dans certains cas, un conditionnement hydrologique supplémentaire peut être requis pour les éléments de drainage zone de rivière plate avec des îles / canaux où des flux 2D peuvent se produire. L’aplanissement des étendues d’eau est recommandé dans le cadre des applications visant les plaines inondables. Les lignes directrices et les spécifications précises seront définies par l’autorité contractante.
Autres considérations
Lidar topo-bathymétrique
On devrait envisager l’utilisation de systèmes lidar topo-bathymétriques pour l’acquisition simultanée et en continuum de données topographiques et bathymétriques. Les méthodes traditionnelles de collecte de données bathymétriques (dans la portion sous-marine de la géométrie du chenal de la rivière), qui misent sur l’installation d’échographes sur des navires ou la réalisation manuelle de levés, coûtent cher, nécessitent du temps et sont potentiellement dangereuses. Les systèmes topo-bathymétriques comprennent un laser vert capable de pénétrer les plans d’eau et de mesurer la bathymétrie. En outre, ces systèmes sont capables de produire des données uniformes d'altitude au-dessus des eaux et sous celles-ci. Les détails sur l'utilisation du lidar topo-bathymétrique sont inclus dans l’appendice 5.
Références
Alberta Environment, 2011. Flood Hazard Identification Program Guidelines. Alberta Environment, Water Management Operations, River Forecast Section, 92 p.
American Society for Photogrammetry and Remote Sensing (ASPRS), 2014. Positional accuracy standards for digital geospatial data, Edition 1, Version 1.0: American Society for Photogrammetry and Remote Sensing, 26 p.
Federal Emergency Management Agency (FEMA), 2016. Guidance for Flood Risk Analysis and Mapping, Elevation Guidance (May 2016): Federal Emergency Management Agency, 21 p.
USGS, 2020, 3DEP LiDAR base specification 2020 rev. A, August 2020): NGL Standards and Specification, 48 p.
Kerr Wood Leidal, 2011. Coastal floodplain mapping – guidelines and specifications. Prepared for the Ministry of Forests, Lands and Natural Resource Operations, Gouvernement de la Colombie-Britannique, 91 p.
Mapcon Mapping Ltd., 2009. Imagery and Elevation Acquisition Guidelines, Version 1.2. Préparé pour le compte du gouvernement du l’Ontario, 18 p.
MMM Group Limited, 2014. Évaluation nationale de la cartographie des plaines inondables – Rapport final. Préparé pour le compte de Sécurité publique Canada.
Ressources naturelles Canada, 2014. Guide d’orientation canadien relatif à l’acquisition d’un lidar aéroporté, version 1.0, 1er mai 2014, 26 p.
Ressources naturelles Canada (RNCan): Guide d’orientation fédéral en géomatique sur la cartographie des zones inondables.
Elevation Coordination and Consultation Committee, Gouvernement de l’Ontario, 2016. Ontario Specifications for LiDAR Acquisition, Version 1.1, 2016-04-15.
Spatial Energistics Group, 2012. LiDAR Data Acquisition and Quality Assurance Specifications, version 1.0. Préparé pour le compte du ministère des Pêches et de l'Aquaculture, Gouvernement de la Nouvelle-Écosse, 61 p.
Appendice 3 – Terrain à fort relief
Introduction
Les activités de cartographie topographique et/ou la réalisation d’inventaires forestiers en terrain à fort relief au moyen de données lidar aéroporté exigent une approche adaptée pour la collecte de données. Les zones à fort relief sont généralement des zones montagneuses qui comportent des pentes abruptes (p. ex., > 35 degrés) et qui sont caractérisées par des variations importantes sur le plan de l’altitude, lesquelles ont une incidence sur la collecte de données par lidar (p. ex., les conditions de surface découlant de la différence de températures à diverses altitudes) ou sur les paramètres de vol en raison des caractéristiques du terrain. Les zones à fort relief compliquent la collecte des données en raison de l’ondulation du terrain, des pentes abruptes, de l’accès difficile et des conditions environnementales. La présente section vise à formuler des recommandations et des considérations quant à la collecte de données par lidar aéroporté dans les zones à fort relief.
| Paramètre | Condition | Description |
|---|---|---|
| Angle de balayage | Choisir des angles de balayage étroits ≤ ±15◦ | La modification rapide des pentes en terrain montagneux peut allonger l’empreinte des impulsions laser et avoir un effet plus prononcé sur les structures verticales, tels les arbres. Les pentes raides augmentent également l’incertitude positionnelle aux extrémités des fauchées. Les angles de balayage étroits minimisent cet effet et permettent une meilleure cartographie des arbres en terrains montagneux. |
| Chevauchement | Recommandation : 50 % | La modification des terrains augmente la possibilité de vides de données sur le plan des données. Un chevauchement accru entre les lignes de vol minimise ces lacunes au niveau des données et augmente la pénétration jusqu’au sol dans les terrains à haut relief. |
| Fréquence de répétition des impulsions (PRF) | Diminuer la PRF afin d’accroître l’énergie des retours d’impulsions et de réduire les pertes d’impulsion. | Les terrains inégaux et à pentes abruptes augmentent la diffusion des impulsions lidar, ce qui entraîne un évanouissement des signaux. Une faible PRF augmente l’énergie des impulsions émises, ce qui peut potentiellement diminuer la perte des impulsions. En outre, l’aéronef peut voler plus haut, ce qui accroît la marge de sécurité. |
| Conditions de la collecte | En altitude, la neige reste plus longtemps au sol et le terrain peut occasionner de plus fortes turbulences aériennes | En altitude, la neige reste plus longtemps au sol. La fenêtre de collecte de données est plus étroite et la planification devrait tenir compte de l’incidence des longues périodes d’enneigement à haute altitude. Les caractéristiques du terrain pourraient accroître les turbulences aériennes dans la zone visée par la collecte de données. Ces conditions auront une incidence sur la qualité des données, et pourraient favoriser les vides de données en raison du roulis de l’avion pour compenser les vents violents. |
| Positionnement | Perte du signal GNSS | L’aéronef et les mesures des points de vérification in situ qui utilisent des récepteurs GNSS pourraient être affectés par les obstacles topographiques. La topographie pourrait avoir une incidence sur la valeur de PDOP, réduisant du coup le nombre de satellites visibles et la capacité de détermination de la position. La distance de la station contrôle au sol recommandée est de 25-30 km. |
| Lignes de vol | Ajuster l’orientation et la dimension des blocs à lever. | La planification du vol devrait tenir compte des caractéristiques topographiques, y compris l’orientation et la taille des blocs à lever afin de créer des zones de fauchées égales et une distribution harmonisée de la densité d’impulsions. Des blocs à lever de petite taille sont recommandés. |
| Accès à distance | Difficulté à recueillir les points de vérification | Les secteurs à fort relief compliquent la collecte des points de vérification. L’accès peut être difficile, ce qui pourrait limiter le nombre de points de vérification. |
Références
Evans, Jeffery, S., Hudak, Andrew, T., Faux, Russ, and Smith, Alistair, M.S. Discrete Return LiDAR in Natural Resources: Recommendations for Project Planning, Data Processing and Deliverables. Remote Sens. 1, 776-794, 2009.
Hirata, Y. The Effect of Footprint Size and Sampling Density In Airborne Laser Scanning To Extract Individual Trees in Mountainous Terrain. International Archives of Photogrammetry, Remote Sensing and Spatial Information Science, Vol. XXXVI-8/W2.
Hopkinson, Chris, Demuth, Mike, Sitar, Mike, and Chasmer, Laura. Application of Airborne LiDAR Mapping in Glacierised Mountainous Terrain. Geoscience and Remote Sensing Symposium, 2001. IGARSS’01. IEEE 2001 International.
Hsu, Wei-Chen, Wu, Li-Wei, and Liu, Jin-King. Airborne LiDAR Survey in Cloudy and Extremely High Relief Mountainous Terrain of Taiwan. IGARSS 2012.
Jordan, Thomas, Marguerite Madden, Byungyun Yang, J. Sharma, and Sudhanshu Panda. "Acquisition of LiDAR for the Tennessee Portion of Great Smoky Mountains National Park and the Foothills Parkway." Center for Remote Sensing and Mapping Science (CRMS), Department of Geography, The University of Georgia, Athens, Georgia, USA, Tech. Rep. USGS Contract (2011).
Mitchell, Brent, Mike Walterman, Tom Mellin, Craig Wilcox, Ann M. Lynch, John Anhold, Donald A. Falk et al. "Mapping vegetation structure in the Pinaleno Mountains using LiDAR-phase 3: Forest inventory modeling." (2012).
Su, Jason, and Bork, Edward. Influence of Vegetation, Slope and LiDAR Sampling Angle on DEM Accuracy. Photogrammetric Engineering & Remote Sensing Vol 72, No 11, pp 1265-1274, 2006.
Appendice 4 – Cartographie des infrastructures urbaines
Introduction
L’avancement de la technologie lidar aéroportée fournit une source de données multidimensionnelles à la cartographie 3D haute précision des milieux urbains. Les applications lidar destinées aux villes comprennent notamment la cartographie des caractéristiques des immeubles et de la foresterie urbaine, la définition des zones inondables, l’extraction des caractéristiques des services publics, la classification de la couverture du sol et l’évaluation de corridors. Il est donc nécessaire d’apporter des ajustements à la collecte et au traitement des données lidar pour tenir compte de la variation du paysage urbain. Le présent guide d’orientation vise à fournir une orientation générale pour la collecte de données lidar pour les différents types d’applications urbaines.
Considérations relatives à la collecte de données
Le tableau D1 présente les considérations et recommandations générales relatives à la collecte de données en milieux urbains.
| Élément | Description |
|---|---|
| Conditions | Il est préférable de recueillir des données lidar portant sur les structures urbaines lorsque les arbres n’ont pas de feuilles, sauf lorsque la collecte vise la foresterie urbaine. Ces conditions augmentent l’exposition du sol, des toitures des bâtiments et des câbles de distribution d’électricité. Les autres conditions de collecte indiquées dans le Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté sont recommandées. |
| Chevauchement des fauchées | Le chevauchement entre les fauchées ne devrait pas être inférieur à 50% afin de réduire les vides de données, l’occultation des bâtiments ou les surfaces réfléchissant peu ou pas les ondes du proche infrarouge, tel le bitume. |
| Angle de balayage | Angles de balayage aigus ayant un champ de vision ≤ 40 (+/- 20 degrés de part et d’autre du nadir) afin de réduire les zones occluses. |
| Exigences en matière d’exactitude | Les applications types de la technologie lidar aux environnements urbains nécessitent une exactitude altimétrique en zone ouverte de 7.5 cm (EQMz) et une exactitude planimétrique 25 cm(EQMr). |
| Empreinte d’impulsion | De petites empreintes sont préférables afin de détecter les arêtes des objets. |
| Retour | Habituellement, plusieurs retours discrets sont requis (au minimum le premier et le dernier retours). Les impulsions intermédiaires sont utiles pour les applications portant sur les arbres/la foresterie, les nombreux câbles de transport d’électricité et la détection des arêtes des bâtiments. |
| Orientation du vol | Selon l’orientation des routes, il serait préférable pour les villes dominées par une grille routière rectiligne que les lignes de vol soient perpendiculaires à l’orientation des routes. De plus, afin de réduire le plus possible les zones occluses, les vols pourraient être orientés de façon à obtenir des lignes parallèles et perpendiculaires. Toutefois, cela entraînera des coûts supplémentaires en raison de l’accroissement des exigences liées aux vols. |
Considérations relatives au traitement des données
Le processus d’acquisition de données lidar doit comprendre les images d’intensité, la classification du nuage de points et les modèles numériques de surface. Les modèles numériques de surface visant les villes comprennent les modèles numériques d'altitude comportant les lignes de rupture appropriées et l’aplanissement des masses d’eau, les modèles numériques de surface et le modèle de hauteur du couvert. La classification additionnelle des nuages de données d’impulsions (LAS 1.4 – R15 classification) dépendrait des exigences spécifiques du projet, mais peut inclure certaines caractéristiques tels les chemins de fer, les revêtements de route, les fils et la végétation. D’autres classes susceptibles d’être affectées à la classe 64-255 pour les environnements urbains comprennent notamment les lampadaires, les marquages routiers, les rails de tramway, les poteaux électriques, les trottoirs, les terrains de stationnement et les sentiers.
Densité d’impulsions pour l’extraction des caractéristiques
Le tableau ci-dessous présente les plages d’intensité d’impulsions lidar recommandées (DNGI) pour les diverses applications urbaines aux fins d’extraction des caractéristiques. La recommandation générale quant à la cartographie urbaine est la suivante : la densité d’impulsions doit être ≥ 10 imp./m2. Toutefois, selon les objectifs spécifiques du projet, la densité d’impulsions peut varier en fonction du type d’extraction de caractéristiques.
| Application | Collecte de données | Traitement des données |
|---|---|---|
| Extraction de l’empreinte des bâtiments | 8 - 15 imp./m2 | L’extraction des empreintes de bâtiments dépend du niveau de détails souhaité des structures et de l’espacement physique entre les bâtiments et les caractéristiques des toitures. Pour les milieux urbains développés, une densité d’impulsions accrue avec une empreinte d’impulsion plus petite est préférable pour définir avec précision les bords des bâtiments, les espaces entre les bâtiments et les caractéristiques des toitures. Les impulsions intermédiaires peuvent être utiles pour le raffinement des bords de bâtiments. |
| Couverture terrestre | 5 - 10 imp./m2 | La classification générale de la couverture terrestre en ville au moyen de données lidar exige une densité d’impulsions suffisante pour distinguer les caractéristiques des différentes couvertures terrestres. Dans les villes, la couverture terrestre change rapidement, et la détection de petits types de couverture terrestre exige une densité d’impulsions accrue. |
| Terrain | 4– 15 imp./m2 | La cartographie de la topographie urbaine exige une densité d’impulsions suffisamment bien répartie pour permettre l’extraction des caractéristiques du sol. La densité d’impulsions dépend de la complexité du terrain et du niveau d'exactitude requis. |
| Cartographie des services publics et de corridors | 10 – 25 imp./m2 | La cartographie des fils électriques, des lampadaires, des marques routières et des panneaux exige une forte densité d’impulsions à empreinte étroite, à impulsions courtes régulières. Les retours d’impulsions intermédiaires pourraient également être utiles pour la cartographie des poteaux à fils électriques multiples. |
| Arbres individuels | 4 - 12 imp./m2 | La modélisation des arbres nécessite une densité d’impulsions plus élevée que pour la cartographie des zones boisées. Pour ce type d’application, il incombe de favoriser une petite empreinte au sol. |
| Zones boisées | 2 – 4 imp./m2 | Ceci est adéquat pour la modélisation de la hauteur du couvert forestier et les retours de sols nus. |
| Modélisation urbaine 3D | 6 – 20 imp./m2 | La densité d’impulsions pour la création de MNS et de MNA, les nuages de points classifiés sont fonction de l’application visée pour le modèle. |
Considérations, limites et postulats
- En fonction de l’application, une valeur comprise dans la plage de densité d’impulsions peut être utilisée comme DNGI dans les formules génériques des sections 5 et 6 du Guide d’orientation fédéral sur l’acquisition de données par lidar aéroporté.
- L’acquisition de données lidar aéroporté au-dessus de zones urbaines peut avoir lieu de jour comme de nuit, et elle peut être restreinte en raison des limites associées au contrôle du trafic aérien. La planification de la collecte de données devrait tenir compte des répercussions sur le calendrier en raison des restrictions de collecte de données à proximité des aéroports.
- Dans les secteurs urbains, l’altitude des bâtiments et des structures peut produire des ombres et des occlusions lidar ce qui peut entraîner une absence considérable de données dans le nuage de points lidar. De ce point de vue, il pourrait être nécessaire d’obtenir plusieurs angles ou de recourir à un champ de vision étroit pour l’application des systèmes lidar en milieux urbains. Cette approche devrait permettre un juste équilibre entre la densité des bâtiments, la hauteur de ceux-ci et l’orientation du réseau routier et les considérations financières.
- Aux fins de la cartographie, les bâtiments et les lignes de transport d’électricité pourraient être cachés par les arbres, ce qui pourrait nuire à leur extraction complète des données lidar. La collecte de données alors que les arbres n’ont pas de feuilles pourrait améliorer la détection de ces caractéristiques.
- Certains murs et toits de bâtiments sont vitrés, c'est-à-dire transparents ou partiellement transparents. Ainsi, il pourrait y avoir un nombre considérable de points lidar inattendus venant de la réflexion des impulsions sur des objets se trouvant à l’intérieur des bâtiments et sous les toitures. Bon nombre de ces points peuvent être considérés comme du bruit, ce qui signifie que les nuages de points classifiés devraient tenir compte des catégories de bruit.
Références
Alexander, Cici, Kevin Tansey, Jörg Kaduk, David Holland, and Nicholas J. Tate. "Backscatter coefficient as an attribute for the classification of full-waveform airborne laser scanning data in urban areas." ISPRS Journal of Photogrammetry and Remote Sensing 65, no. 5 (2010): 423-432.
Awrangjeb, Mohammad, Chunsun Zhang, and Clive S. Fraser. "Automatic extraction of building roofs using LIDAR data and multispectral imagery." ISPRS Journal of Photogrammetry and Remote Sensing 83 (2013): 1-18.
Awrangjeb, Mohammad, and Clive S. Fraser. "An automatic and threshold-free performance evaluation system for building extraction techniques from airborne LiDAR data." IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 7, no. 10 (2014): 4184-4198.
Awrangjeb, Mohammad, Guojun Lu, and C. Fraser. "Automatic building extraction from LiDAR data covering complex urban scenes." The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 40, no. 3 (2014): 25.
Clode, Simon, Peter J. Kootsookos, and Franz Rottensteiner. "The automatic extraction of roads from LIDAR data." In The International Society for Photogrammetry and Remote Sensing's Twentieth Annual Congress, vol. 35, pp. 231-236. ISPRS, 2004.
Dorninger, Peter, and Norbert Pfeifer. "A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds." Sensors 8, no. 11 (2008): 7323-7343.
Hu, Xiangyun, Yijing Li, Jie Shan, Jianqing Zhang, and Yongjun Zhang. "Road centerline extraction in complex urban scenes from LiDAR data based on multiple features." IEEE Transactions on Geoscience and Remote Sensing 52, no. 11 (2014): 7448-7456.
Jarzabek-Rychard, M., and H. G. Maas. "Aerial image based geometric refinement of building models derived from airborne LiDAR data." (2016).
Jwa, Yoonseok, and Gunho Sohn. "A piecewise catenary curve model growing for 3D power line reconstruction." Photogrammetric Engineering & Remote Sensing 78, no. 12 (2012): 1227-1240.
Li, Zhengrong, Troy S. Bruggemann, Jason J. Ford, Luis Mejias, and Yuee Liu. "Toward automated power line corridor monitoring using advanced aircraft control and multisource feature fusion." Journal of Field Robotics 29, no. 1 (2012): 4-24.
Marks, Kate, and Paul Bates. "Integration of high-resolution topographic data with floodplain flow models." Hydrological Processes 14, no. 11-12 (2000): 2109-2122.
McLaughlin, Robert A. "Extracting transmission lines from airborne LIDAR data." IEEE Geoscience and Remote Sensing Letters 3, no. 2 (2006): 222-226.
Meesuk, Vorawit, Zoran Vojinovic, Arthur E. Mynett, and Ahmad F. Abdullah. "Urban flood modelling combining top-view
Yan Wai Yeung, Shaker Ahmed, and El-Ashamwy Nagwa. “Urban land cover classification using airborne LiDAR data: a review. “Volume 158, 1 March 2015, Pages 295-310.
Appendice 5 – Lidar topo-bathymétrique aéroporté
Introduction
Les systèmes lidar topo-bathymétriques (LTB) aéroporté utilisent généralement deux lasers : un laser proche infrarouge (PIR) pour la collecte de données topographiques et un laser vert pour la collecte de données bathymétriques. Ces systèmes permettent de générer des modèles numériques de terrain (MNT) uniformes à haute résolution qui comprennent l’élévation sous-marine et de la terre ferme. Le LTB fonctionne aussi bien en eau douce qu’en eau salée; toutefois, la clarté de l’eau constitue généralement le facteur limitant. Bien que les capteurs LTB conçus pour fonctionner en eau peu profonde soient relativement nouveaux, les capteurs laser bathymétriques aéroporté conçus pour fonctionner en eau plus profonde ont traditionnellement été désignés dans les ouvrages scientifiques comme étant des systèmes lidar bathymétriques aéroporté. Pour la présente annexe, tous les systèmes seront appelés systèmes lidar topo-bathymétriques (LTB). La technologie des systèmes LTB existe depuis la fin des années 1980 et le début des années 1990. Un texte récent intitulé « Airborne Laser Hydrography II » présente un historique détaillé de la technologie et un examen des systèmes actuels et de l’application du LTB. Ce texte peut être téléchargé gratuitement (Philpot, 2019).
La présente annexe a pour but de se pencher sur la composante lidar bathymétrique des systèmes LTB pour les spécifications et les lignes directrices. L’accent est mis sur le LTB pour les applications liées aux risques d’inondation. Pour obtenir des renseignements sur la composante topographique des levés LTB, il convient de consulter la section 6 du guide d’orientation actuel et l’appendice 2 sur la cartographie des inondations. La composante topographique des levés LTB pour des applications liées aux risques d’inondation doit au moins satisfaire aux exigences présentées dans l’appendice 2.
Principes généraux du lidar topo-bathymétrique
Le LTB fonctionne en émettant un laser proche infrarouge (PIR) et un laser vert à partir d’un aéronef, généralement selon une forme de balayage elliptique ou circulaire, et en mesurant le temps de déplacement des impulsions laser vers et en provenance de la terre ferme, de la surface de l’eau et du fond marin (Figure A1 A, B). L’impulsion du laser proche infrarouge (PIR) est réfléchie par la terre ferme ou l’eau, tandis qu’une partie de l’impulsion du laser vert est réfléchie au niveau de l’interface air-eau, le reste étant réfracté et atténué lorsqu’il traverse la colonne d’eau et réfléchi à partir du fond marin pour revenir au détecteur (Figure A1-C, D). La trajectoire du laser vert est complexe. Lorsqu’il passe de l’air à l’eau, la vitesse de la lumière ralentit d’environ 25 % et celle-ci est donc réfractée. Une fois dans la colonne d’eau, la lumière verte est dispersée et perd son énergie de manière exponentielle selon la profondeur jusqu’à ce qu’elle soit réfléchie par le lit de la rivière ou de la mer et retourne au détecteur. Afin de compenser l’angle de réfraction et la variation de la vitesse de la lumière de l’air à l’eau, le système doit être en mesure de détecter la surface de l’eau. Les retours du laser PIR et du laser vert sont utilisés pour détecter la surface de l’eau afin de compenser ces effets optiques du changement de milieu du laser vert de l’air à l’eau et le chemin de retour vers le détecteur. La divergence de faisceau du laser PIR est typiquement similaire à celle du lidar topographique de l’ordre de 0,5 mrad, alors que le laser vert aura une plus grande divergence de faisceau sur de nombreux capteurs lidar TBL.
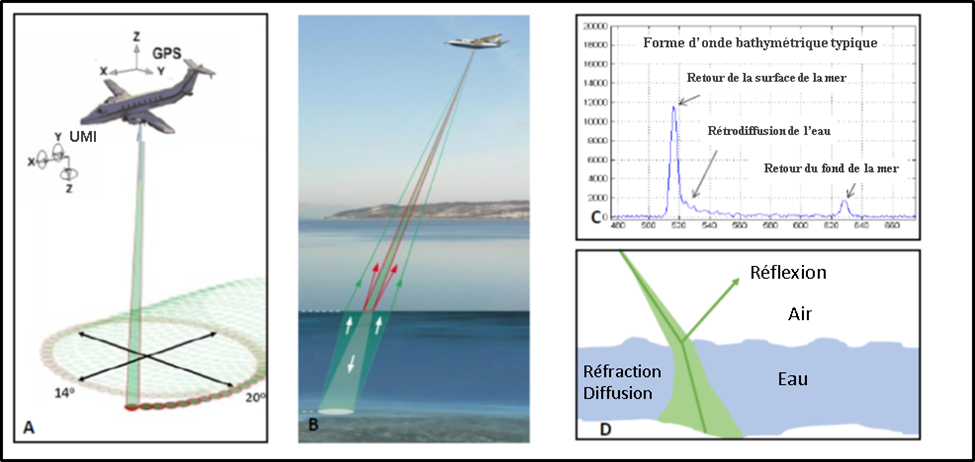
Figure A1. Principes du lidar topo-bathymétrique (LTB).
text version
- A – Forme de balayage elliptique typique pour le LTB avec système de navigation GPS + UMI. Image tirée et adaptée de Leica Geosystems.
- B – La plupart des systèmes LTB sont équipés d’un laser PIR et d’un laser vert.
- C – Forme d’onde typique captée à partir du laser vert.
- D – Interaction de la lumière du laser vert lors du déplacement entre l’air et l’eau, la réfraction et la diffusion ont lieu.
La clarté de l’eau est le principal facteur limitant ayant une incidence sur la profondeur de pénétration du lidar topo-bathymétrique. Par conséquent, la gestion des conditions de turbidité est nécessaire pour assurer la réussite des levés. Les principales sources qui peuvent nuire à la pénétration du laser vert dans la colonne d’eau proviennent des sédiments en suspension, bien que la prolifération d’algues puisse également avoir des effets négatifs, de même que de la matière organique dissoute qui peut être fréquente dans certains lacs et cours d’eau provenant de tourbières. Les fluctuations de la clarté de l’eau d’un site d’étude doivent être prises en compte lors de la planification d’un levé (voir la section « Lignes directrices pour un projet lidar topo-bathymétrique »). De plus, le laser vert du LTB ne pénètre pas les bulles d’air (« moutons », zone de déferlement, etc.) en raison de la diffusion. Cette situation a des répercussions le long des côtes où il y a de fortes vagues qui peuvent nécessiter le survol à deux reprises à des niveaux de marée différents.
Les opérations aériennes, la configuration des stations de base du GNSS et les principes d’étalonnage des capteurs sont semblables à ceux du lidar topographique typique et ne sont donc pas présentés ici.
Le traitement des données LTB après un levé est similaire à celui des données topographiques, car la première étape consiste à traiter la trajectoire de l’aéronef en utilisant une station de base au sol, le GNSS et l’unité de mesure inertielle dans le capteur. Lors d’un levé LTB, les formes d’onde du laser PIR et du laser vert sont enregistrées et sont liées à la trajectoire par le temps GNSS. Une fois liées à la trajectoire, les formes d’onde sont ensuite soumises à un post-traitement afin de générer des points discrets. Pendant le traitement des formes d’onde du laser vert, la surface de l’eau est détectée et modélisée pour que la trajectoire de l’impulsion du laser vert soit réfractée à la surface de l’eau et que la portée soit ajustée par la variation de la vitesse de la lumière dans l’eau. La forme d’onde typique enregistrée par le laser vert consiste en un retour de grande amplitude de la surface de l’eau, suivi par la rétrodiffusion volumique de l’impulsion laser à travers la colonne d’eau, puis par un pic représentant la réflexion sur le fond marin ou le lit de la rivière (Figure A1-C).
L’un des avantages clairs du levé hydrographique par LTB par rapport à l’échosondage réside dans le fait que la vitesse de la lumière dans l’eau n’est que légèrement affectée par les changements de salinité et de température, en comparaison à la façon dont ces propriétés affectent la vitesse du son dans l’eau. Cette propriété rend le LTB idéal pour les levés dans les milieux estuariens où l’eau douce et l’eau salée se mélangent de manière parfois complexe.
Avantages du lidar topo-bathymétrique pour la cartographie des zones inondables
La plupart des cartes des zones inondables récentes sont fondées uniquement sur le lidar topographique sans aucun détail sur la bathymétrie. Bien que les méthodes utilisées pour produire des cartes de zones inondables à partir du lidar topographique se soient révélées raisonnablement précises, ces méthodes ne permettent pas de calculer la vitesse de l’eau de crue ni le moment et la durée de l’inondation. Pour calculer ces variables, il faut utiliser un logiciel de modélisation hydrodynamique. L’un des principaux paramètres qui contrôlent le mouvement de l’eau dans un modèle hydrodynamique est la bathymétrie. D’autres paramètres ont également une incidence sur le mouvement de l’eau, notamment la rugosité du lit, parfois définie comme le coefficient de rugosité de Manning, qui a une incidence sur la traînée entre l’eau et le lit. Les résultats du levé LTB peuvent fournir des renseignements sur la topographie et le matériau du lit (avec l’intensité du lidar) et ont été utilisés pour construire des cartes de la couverture benthique ou des cartes d’habitats (Webster et coll., 2016), qui peuvent être utilisées pour estimer la rugosité du lit pour les modèles hydrodynamiques.
Les risques d’inondations côtières sont associés à une élévation du niveau de la mer associée aux ondes de tempête. En plus des niveaux d’eau totaux élevés (marée + onde de tempête), les vagues et la remontée de vagues peuvent également provoquer des inondations et une érosion supplémentaire. Afin de modéliser l’hydrodynamique d’une onde de tempête ainsi que la configuration et la remontée possibles des vagues, un MNT uniforme est nécessaire. Pour calculer la configuration et la remontée de vagues, la bathymétrie près du littorale est nécessaire (Olabarrieta et Warner, 2016). La bathymétrie près du littoral a longtemps représenté un défi pour la cartographie avant l’avènement du LTB. La plupart des techniques de cartographie de l’élévation du terrain ne fonctionnent pas dans la zone côtière (p. ex., la photogrammétrie, le lidar topographique) et les techniques de cartographie des eaux profondes, comme l’échosondage par bateau, sont dangereuses et inefficaces dans les eaux peu profondes. La capacité du LTB à acquérir des MNT uniformes dans toute la zone côtière jusqu’au bord de l’eau a permis la construction de modèles hydrodynamiques détaillés.
Dans le cas de la cartographie des risques d’inondation fluviale ou à l’intérieur des terres, de nombreuses études ont utilisé le lidar topographique pour cartographier les plaines inondables exposées et estimer la topographie du chenal de rivière. De nombreux modèles fluviaux sont basés sur des modèles hydrodynamiques unidimensionnels, ou modèles 1-D dans lesquels les coupes transversales sont extraites des plaines inondables et du chenal de rivière et utilisées pour calculer la quantité de mouvement et la masse de l’eau se déplaçant dans la section. Le mesurage manuel des coupes transversales du lit de la rivière (p. ex., à l’aide du GNSS ou d’un échosondage par bateau) est coûteux, nécessite beaucoup de temps et, dans certains cas, est dangereux pour les opérateurs. Par conséquent, la topographie du chenal n’est mesurée que dans quelques coupes transversales et les zones restantes sont estimées par interpolation ou à l’aide d’une relation empirique fondée sur la géomorphologie du chenal exposé. Le débit (exprimé en mètres cubes par seconde) d’une rivière est contrôlé par la bathymétrie et la pente du chenal. La capacité du LTB à acquérir des données altimétriques uniformes des plaines inondables et du chenal de rivière offre un grand potentiel d’amélioration de la précision des coupes transversales utilisées dans les modèles d’inondation.
Normes en matière d’exactitude
L’Organisation hydrographique internationale (OHI) spécifie différents ordres pour les données bathymétriques en termes d’exactitude verticale ou horizontale totale, avec un intervalle de confiance de 95 % (OHI, 2008). La norme d’ordre 1 s’applique aux zones où la profondeur d’eau est inférieure à 100 m et l’ordre spécial est généralement recommandé pour les zones ou les applications nécessitant la plus grande précision de levé. L’incertitude verticale totale (IVT) varie avec la profondeur et est définie dans l’équation ci-dessous, où « a » représente la portion de l’incertitude qui ne varie pas avec la profondeur (p. ex., l’incertitude quant à la position de l’aéroport par rapport au traitement de la trajectoire), « b » est un coefficient qui représente la portion de l’incertitude qui varie avec la profondeur « d ». Tous les systèmes LTB actuellement sur le marché peuvent dépasser les exigences de l’ordre 1 définies par l’OHI pour les profondeurs inférieures à 100 m (Saylam et coll., 2018).
IVT = (a2 + [b x d]2)1/2
Le tableau suivant décrit les différents ordres de l’OHI et l’exactitude horizontale et verticale attendue.
| Ordre | Exclusif | Spécial | 1a | 1b | 2 | 3 (Imprécis) |
|---|---|---|---|---|---|---|
| Exemples de zones typiques | Eaux peu profondes dans les ports, les zones d'accostage et les canaux où la hauteur d’eau sous la quille est critique, ou pour les relevés d’ingénierie. | Ports, zones d'accostage et canaux où la hauteur d’eau sous quille est critique. | Zones de fonds inférieurs à 100 mètres où la hauteur d’eau sous quille est moins critique mais où il existe des éléments pouvant engager la sécurité de la navigation de surface. | Zones de fonds inférieurs à 100 mètres où la hauteur d’eau sous quille n’est pas considérée comme un problème pour le type de navigation de surface attendu dans la zone. | Zones de fonds généralement supérieurs à 100 mètres où une description générale du fond est considérée comme suffisante. | Toutes les autres zones où l’exactitude ne rencontre pas les exigences des ordres précédentes. |
| Exactitude horizontale (Niveau de conf. de 95%) | 1m | 2m | 5m + 5% de la profondeur | 5m + 5% de la profondeur | 20m + 10% de la profondeur | >20m + 10% de la profondeur |
| Exactitude verticale pour les profondeurs réduites (Niveau de conf. de 95% | a = 0,15m b = 0,0075 |
a = 0,25m b = 0,0075 |
a = 0,5m b = 0,013 |
a = 0,5m b = 0,013 |
a = 1m b = 0,023 |
Identique à l’ordre 2 |
Afin de mieux comprendre la variation de l’IVT en fonction de la profondeur pour ces différents ordres de l’OHI, l’IVT a été calculée à des profondeurs typiques atteintes par les capteurs lidar en eaux peu profondes (15 m) et les capteurs en eaux profondes (20 m et plus) (Tableau E).
| Ordre de l’OHI | a | b | IVT (m) d = 5 m | IVT (m) d = 10 m | IVT (m) d = 15 m | IVT (m) d = 20 m |
|---|---|---|---|---|---|---|
| Ordre exclusif | 0,15 | 0,0075 | 0,15 | 0,17 | 0,19 | 0,21 |
| Ordre spécial | 0,25 | 0,0075 | 0,25 | 0,26 | 0,27 | 0,29 |
| Ordre 1a | 0,5 | 0,013 | 0,50 | 0,52 | 0,54 | 0,56 |
| Ordre 1b | 0,5 | 0,013 | 0,50 | 0,52 | 0,54 | 0,56 |
D’autres niveaux de qualité bathymétrique existent, comme ceux élaborés plus récemment dans le cadre de la « US’ National Coastal Mapping Strategy 1.0: Coastal Lidar Elevation for a 3-D Nation » (NSTC, 2016); toutefois, ils ne sont pas détaillés dans la présente annexe. Veuillez prendre note que certains de ces niveaux de qualité sont équivalents à ceux des ordres de l’OHI.
Considérations relatives aux paramètres d’acquisition
En ce qui concerne les acquisitions de données LTB à des fins de cartographie des zones inondables et des risques d’inondation, Tableau E3 fournit un résumé des paramètres d’acquisition recommandés en fonction des connaissances scientifiques actuelles et des capteurs disponibles.
| Paramètres | Recommandation |
|---|---|
| Densité de points bathymétriques | ≥ 2 pts/m2 (applicable pour les zones submergées au moment du levé). |
| Exactitude | Des exactitudes verticales et horizontales équivalentes à l’ordre spécial de l’OHI sont recommandées. |
| Chevauchement de fauchées | 20 % minimum, mais 50 % est recommandé. |
| Altitude de vol | 400 m est recommandé. |
| Zone sur terre ferme | Un minimum de 400 m à l’intérieur des terres horizontalement, à partir du niveau moyen des basses eaux. |
| Profondeur de la pénétration du levé lidar | Minimum 1,5 fois la profondeur de Secchi. La profondeur de pénétration moyenne prévue est de 4 à 9 m dans les zones côtières, en fonction de la clarté de l'eau. Cette valeur pourrait être inférieure dans certaines rivières peu profondes. |
| Angle de balayage maximal | Un angle de ± 20 degrés est recommandé (champ de vision de 40 degrés). |
| Moment de l’acquisition | Pour les zones affectées par les marées, l’acquisition doit se faire autant que possible autour de la marée basse (c’est-à-dire entre deux heures avant et deux heures après la marée basse). |
- Il est généralement admis que les LTB en eaux peu profondes sont les capteurs appropriés pour les études sur les risques d’inondation et la cartographie des zones inondables. Dans les cas où il faut atteindre des profondeurs de 2 à 3 fois la profondeur de Secchi à une densité de points plus faible pour la couverture bathymétrique afin de soutenir la cartographie des risques d’inondation, une combinaison de capteurs en eau peu profonde et en eau profonde peut convenir. Il existe aussi des systèmes qui combinent des capacités en eau peu profonde et en eau profonde. Dans le cas contraire, les capteurs en eau peu profonde fournissent la densité de points et la pénétration nécessaires pour appuyer la plupart des études sur les risques d’inondation et peuvent être complétés par des données d’échosondage.
- En ce qui concerne les acquisitions de données LTB liées à des relevés hydrographiques et aux cartes marines, le Service hydrographique du Canada exige que l’exactitude de la partie bathymétrique du TBL satisfasse aux normes de l’ordre 1b de l’OHI. Il exige également des capteurs TBL en eau profonde capables de pénétrer à une profondeur de Secchi de 2 à 3 dans des conditions optimales.
Lignes directrices pour un projet lidar topo-bathymétrique
La présente section vise à fournir des directives générales relatives à un projet LTB. Les détails et les méthodes ont été inspirés des spécifications du Service hydrographique du Canada, des spécifications de la NOAA et de la littérature existante (p. ex., Webster et coll., 2016; Saylam et coll., 2018).
A) Planification du projet et collecte
Au cours de la phase de planification de la mission et de l’exécution du levé, l’entrepreneur doit tenir compte et mettre en oeuvre des stratégies visant à atténuer les répercussions des paramètres suivants:
- La topographie de la zone d’acquisition et de ses environs, comme les terrains montagneux qui pourraient empêcher ou gêner les opérations aériennes.
- Les conditions météorologiques, notamment la clarté de l’eau et la gestion de la turbidité. Voir la sous-section « Considérations relatives à la clarté de l’eau » ci-dessous pour de plus amples renseignements.
- Les phénomènes indigènes, tels que la croissance du varech et la prolifération d’algues.
- L’acquisition maximale de données autour de la marée basse, c’est-à-dire entre deux heures avant et deux heures après celle-ci.
- L’inclusion de toutes les baies, les bras de mer, les îles, les péninsules, les zones intertidales, les plaines inondables, les deltas fluviaux et les zones terrestres se trouvant à l’intérieur des zones d’acquisition.
La densité de points requise est également importante, car elle peut avoir une incidence sur le nombre de lignes de vol nécessaires et le niveau de chevauchement entre les lignes de levé. En général, si la densité de points souhaitée peut être atteinte avec une seule ligne de vol, alors un chevauchement de 20 % est suffisant pour garantir qu’il n’y ait pas de zones sans données pendant la collecte. Un chevauchement de 50 % est recommandé pour les acquisitions LTB liées aux inondations afin de réduire les vides de données et d’assurer une répartition plus uniforme des points. Il est entendu que la densité demandée peut ne pas être atteinte en raison de certaines conditions environnementales qui ne peuvent être contrôlées. Le Tableau E3 présente les paramètres d’acquisition recommandés pour les acquisitions de données LTB pour les applications liées aux inondations.
Les lignes de vol doivent être survolées dans des sens opposés. Elles doivent également être planifiées jusqu’aux profondeurs maximales attendues, dans l’intention de recueillir des données jusqu’au point d’extinction, et pas nécessairement dans toute l’étendue des zones de relevés. Des lignes transversales doivent être tracées à travers toutes les lignes de vol prévues, à des angles variant de 45 à 90 degrés de plus que la ligne de vol initiale. Les lignes transversales doivent être acquises et traitées selon les mêmes normes d’exactitude et de qualité des données que les lignes de vol principales, et peuvent être incluses dans le produit final.
Pour les utilisations de cartographie et de modélisation du littoral, il est particulièrement important de disposer de bonnes données bathymétriques dans les zones très peu profondes (0 à 4 m). Pour cette raison, les systèmes lidar, les logiciels et les procédures de traitement doivent permettre de mesurer la bathymétrie dans cette région très peu profonde. Le capteur utilisé pour cette cartographie doit avoir une plage de profondeur de mesure opérationnelle égale ou supérieure à 1,5 fois la profondeur de Secchi.
Le moment de l’acquisition doit également être pris en compte lors de la réalisation d’un projet LTB. Le problème de la végétation en surplomb qui obscurcit le lit de la rivière constitue l’un des défis des acquisitions LTB fluviaux dans des conditions de plein feuillage. Pour résoudre ce problème, on peut effectuer des levés au printemps ou à l’automne, lorsque les arbres ne portent aucune feuille. Les avantages de l’absence de feuilles dans les arbres devraient être évalués en fonction de l’augmentation du niveau de l’eau et, potentiellement, en fonction des conditions de clarté de l’eau.
Bien que ce ne soit pas obligatoire, il est souvent souhaitable d’avoir une équipe de terrain sur l’eau pendant l’acquisition. L’équipe de terrain peut recueillir des mesures de profondeur de Secchi pour confirmer les conditions de clarté de l’eau (voir la sous-section « Considérations relatives à la clarté de l’eau » pour de plus amples renseignements) et, selon l’application finale des données, recueillir des échantillons de fond et des photographies pour déterminer le matériau de couverture benthique. L’équipe de terrain peut également recueillir des points de vérification sur les surfaces dures sur terre ferme et sur le fond marin ou le lit de la rivière pour vérifier l’exactitude des points lidar (voir la section « Validation des données » ci-dessous).
Si des levés côtiers sont effectués et que des îles doivent être arpentées, un avion bimoteur doit être utilisé afin de pouvoir atterrir en toute sécurité en cas de panne de moteur. En plus de cette exigence de sécurité, la plupart des levés LTB nécessitent un aéronef plus gros en raison de la puissance accrue requise pour le laser vert.
Considérations relatives à la clarté de l’eau
En ce qui concerne les acquisitions LTB côtiers et fluviaux, les conditions météorologiques qui précèdent un levé peuvent avoir une grande incidence sur la clarté de l’eau et la probabilité d’une acquisition réussie. Par exemple, dans les zones côtières, un vent de terre peut provoquer des vagues qui mettent les sédiments en suspension et, par conséquent, des conditions de turbidité élevée où les particules dans l’eau font que la lumière se disperse et ne pénètre pas le fond marin. Dans le cas des environnements fluviaux, de fortes pluies peuvent entraîner le transport de sédiments et d’autres matières organiques dans la rivière, ce qui dégrade la clarté de l’eau. La gestion de la turbidité implique la compréhension des conditions environnementales qui provoquent une forte turbidité (par exemple, le vent et la pluie) et du temps nécessaire à la clarification de l’eau avant qu’elle ne puisse être propice à l’acquisition (Webster et coll., 2016). Un facteur secondaire ayant une incidence sur la pénétration du laser vert est la luminosité du fond marin ou du lit de la rivière. Les objets plus sombres ont tendance à absorber la lumière verte, tandis que les objets clairs, tels que le sable, réfléchissent davantage la lumière verte et permettent ainsi aux signaux de réfléchir vers le capteur à des profondeurs plus importantes.
Un disque de Secchi est généralement divisé en quadrants noirs et blancs afin de maximiser le contraste, et la profondeur à laquelle le disque noir et blanc disparaît de la vue est appelée « profondeur de Secchi ». Les eaux claires ont une plus grande profondeur de Secchi que les eaux plus turbides, et la taille du disque de Secchi peut devoir être ajustée en fonction des différentes conditions de clarté de l’eau (Philpot, 2019). Les capteurs LTB utilisés en eaux peu profondes ont généralement une profondeur nominale de 1,5 fois la profondeur de Secchi, et les capteurs utilisés en eaux profondes ont une profondeur nominale de 2 à 3 fois la profondeur de Secchi.
En principe, lorsque l’on effectue des acquisitions LTB côtières, il y a plusieurs sites d’acquisition dans la région qui ont des orientations littorales différentes, de sorte que tous les sites ne seront pas turbides à la suite d’un épisode de vent régional. Il peut être difficile d’obtenir des profondeurs de Secchi avant de procéder à un levé LTB et donc de s’assurer que les conditions sont adéquates. Il existe de nombreuses stations météorologiques terrestres accessibles en ligne qui peuvent fournir des renseignements sur les conditions de vent et de pluie passées et actuelles; toutefois, il peut être difficile de prévoir les conditions de turbidité, surtout après un épisode de vent, lorsque l’eau a besoin de temps pour se clarifier. Cette réalité a mené à l’étude de la possibilité d’utiliser des capteurs de turbidité en temps réel qui peuvent être déployés dans des baies présentant différentes orientations littorales ou différentes conditions géologiques et sédimentaires. Ces bouées de turbidité en temps réel sont équipées d’un capteur de turbidité et d’un logiciel de communication (p. ex., un modem cellulaire) qui peut transférer les relevés sur Internet pour vérification à distance. Cette stratégie permet de mesurer et de surveiller une série chronologique de conditions de turbidité avant de s’engager dans un vol LTB.
Une autre approche pour mesurer la clarté de l’eau consiste à utiliser le coefficient d’atténuation diffuse (𝐾𝑑). Le taux de variation de l’éclairement énergétique, E, est fonction de la profondeur (Ed) et constitue une mesure de la clarté de l’eau dont le concept est similaire à la profondeur de Secchi en ce sens que le taux de variation sera plus rapide dans les eaux turbides que dans les eaux claires. Le taux de variation de l’Ed, ou dérivé logarithmique de l’Ed, est le coefficient d’atténuation diffuse, 𝐾𝑑 (Philpot, 2019).
Figure A2. Coefficient d’atténuation diffuse 𝐾𝑑, E(λ) distribution de la luminance énergétique sur un hémisphère à une certaine longueur d’onde d’énergie (λ) à la profondeur z (Philpot, 2019).
Les valeurs de Kd peuvent changer rapidement pour un plan d’eau; toutefois, les valeurs typiques de Kd varient de 0,05 pour l’eau claire à 0,11 pour l’eau turbide pour les longueurs d’onde utilisées dans le cadre du LTB. Pour les zones côtières, certains satellites équipés de caméras à résolution moyenne, tels que le spectroradiomètre imageur à résolution moyenne (MODIS), peuvent aider à estimer la valeur de Kd ou de la profondeur de Secchi pour certaines longueurs d’onde, ce qui peut aider à déterminer si une acquisition LTB est réalisable pour une zone ou la meilleure saison pour tenter de réaliser une acquisition.
B) Traitement et gestion des données
Une fois que les données de forme d’onde ont été traitées afin de générer des points discrets (voir la section « Principes généraux du lidar topo-bathymétrique » pour obtenir de plus amples renseignements), la classification est alors généralement effectuée. Les points situés dans les zones bathymétriques doivent être classés selon les classes détaillées dans le Tableau E. Nous recommandons que les points situés sur terre ferme soient classés au moins selon les classes précisées à la section 5 du guide d’orientation actuel. Il est généralement nécessaire de combiner des méthodes automatiques et manuelles pour la classification en utilisant les outils habituellement utilisés pour le traitement de données lidar topographique. La plupart des systèmes LTB sont équipés d’un système de caméra RVB ou multispectral qui peut être utilisé pour colorer le nuage de points lidar et générer des orthophotos. Les orthophotos coïncidentes peuvent être très utiles pour aider à l’interprétation de certains des retours lidar.
| Valeur de classification | Signification |
|---|---|
| 40 | Point bathymétrique (p. ex., fond marin ou lit de rivière; également appelé topographie submergée) |
| 41 | Surface de l’eau (surface de la mer, de la rivière ou du lac à partir d’un lidar bathymétrique ou topographique-bathymétrique; distincte de la classe de points 9, qui est utilisée en lidar strictement topographique et désigne tout simplement « eau » et non « surface de l’eau ») |
| 42 | Surface de l’eau dérivée (emplacement synthétique de la surface de l’eau utilisé dans le calcul de la réfraction à la surface de l’eau) |
| 43 | Objet submergé, sans autres précisions (p. ex., épave, rocher, pieux submergé) |
| 44 | Objet S-57 selon l’Organisation hydrographique internationale (OHI), non spécifié ailleurs |
| 45 | Pas de fond trouvé (point lidar bathymétrique pour lequel aucun retour de fond détectable n’a été reçu) |
Lors du traitement des données, toutes les erreurs aberrantes et les artefacts (bateaux, pêcheries, mauvaises herbes, etc.) doivent être affectés à la classe 1.
Les données de nuages de points livrées et/ou les MNA dérivés doivent constituer un produit uniforme (c.-à-d. des données lidar topographiques et bathymétriques jointes), référencées à des systèmes de coordonnées de référence planimétrique et altimétrique communs. En ce qui concerne les études portant sur les risques d’inondation, nous recommandons d’utiliser les mêmes systèmes de coordonnées de référence que ceux recommandés pour les données lidar topographiques dans le Guide d’orientation actuel (voir la section 6.3.3).
Pour les cartes marines, il peut être nécessaire de référencer les données bathymétriques au zéro des cartes. Dans certains cas, le responsable technique peut fournir un modèle de séparation entre le zéro des cartes et les altitudes ellipsoïdales pour effectuer une transformation altimétrique. Si aucun fichier de ce genre n’est fourni, le fournisseur est encouragé à utiliser le processus du Canadian Continuous Vertical Datum for Canadian Waters [Système canadien de référence altimétrique continu pour les eaux canadiennes – CVDCW] et les surfaces de séparation verticale hydrographique (HySEP ou SEP) applicables pour la zone du levé. La HySEP/SEP fournit la séparation entre le zéro des cartes et l’ellipsoïde du GRS80 (système de référence NAD83(SCRS)).
Les données de nuages de points livrées doivent être classifiées et dans un format de nuage de points LAS 1.4. Des valeurs d’intensité doivent être requises pour chaque retour discret multiple. Les valeurs enregistrées dans les fichiers LAS doivent être normalisées à 16 bits, comme il est décrit dans la spécification LAS.
C) Validation des données
Dans la mesure du possible, il est toujours recommandé d’acquérir des points de vérification indépendants d’une grande exactitude en vue de les comparer aux points lidar topographiques et bathymétriques. L’approche standard consiste à utiliser la technologie GNSS RTK pour acquérir des points de vérification dans la plaine inondable et dans le chenal de rivière. Pour de plus amples renseignements sur les méthodes de validation des données lidar topographiques, voir la section 6.4 du présent guide d’orientation.
Pour la partie bathymétrique d’une acquisition LTB, les exigences d’exactitudes horizontale et verticale sont définies à l’aide des ordres de l’OHI, comme il a été mentionné plus tôt (section « Normes en matière de précision »). Toutefois, il n’existe pas de lignes directrices établies en ce qui concerne le nombre de points de vérification requis ou leur répartition pour les levés LTB. Comme pour toutes les techniques de validation, les points de vérification utilisés pour valider les points lidar ou les modèles numérique d’élévation doivent être au moins 3 fois plus précis que l’exactitude exigée pour la donnée lidar.
Il est recommandé que pour les acquisitions LTB fluviales, les coupes transversales soient prises en positionnant les points GNSS directement dans le lit de la rivière et, lorsque cela n’est pas possible, en utilisant des techniques d’échosondage. Ces points de vérification doivent être répartis de manière à inclure des exemples de profondeurs et de conditions variables dans la rivière.
Dans le cas des acquisitions LTB côtières, des mesures directes de l’élévation du fond marin sont possibles à l’aide d’une antenne GNSS connectée à un poteau extensible, de l’ordre de 4 m. Cela permet d’assurer des mesures directes du fond marin pour les points de vérification en eaux peu profondes. Ces points de vérification doivent être pris près du moment de l’acquisition, à moins que le fond marin ne soit constitué d’un substrat rocheux exposé et ne soit pas susceptible de changer au fil du temps. Dans les zones plus profondes, des techniques d’échosondage peuvent être utilisées si l’exactitude altimétrique des données est appropriée. Comme dans le cas du lidar topographique, l’exactitude altimétrique attendue des acquisitions LTB sera influencée par les conditions du fond marin et variera en fonction de la présence, la hauteur et la densité de végétation aquatique submergée. Les systèmes LTB utilisent une lumière verte qui ne pénètre pas dans une canopée dense de végétation aquatique submergée, comme dans le cas du lidar topographique et de la végétation dense sur terre ferme. Ainsi, lors de la collecte des points de vérification sur le fond marin, il est également souhaitable de mesurer la présence et la hauteur de la végétation aquatique submergée.
D) Livrables
Avant la période d’acquisition des données, il est recommandé que l’entrepreneur fournisse au responsable technique un rapport relatif à la planification du projet contenant des détails sur la mobilisation de l’équipe, les données du GNSS et des stations de base, l’approche de surveillance de la clarté de l’eau, les rapports d’étalonnage et les méthodes, ainsi qu’un calendrier détaillé du projet. La planification du projet pourrait être soumise à l’acceptation du responsable technique.
Pendant la période d’acquisition, il est recommandé que l’entrepreneur fournisse au responsable technique des rapports d’étape à intervalles réguliers ou après les jours d’acquisition.
Les livrables finaux typiques pour un projet LTB peuvent comprendre les éléments suivants :
- Fichiers lidar topo-bathymétriques uniformes et classifiés. Dans certains cas, la combinaison topographique et bathymétrique des nuages de points pourrait ne pas être requise. De plus, le nuage de points bruts pourrait être demandé.
- Modèles numériques d’élévations topo-bathymétriques uniformes. Pour certains projets, la combinaison topographique et bathymétrique des modèles numériques d’élévation peut ne pas être requise.
- Rapport final du projet, comprenant, sans s’y limiter, des détails sur l’acquisition des données, le traitement et l’évaluation de la qualité des données, les techniques de positionnement et le contrôle au sol. Ce rapport doit contenir suffisamment de détails pour démontrer que les spécifications ont été respectées pour chaque donnée d’impulsion recueillie.
- Empreinte finale montrant la couverture des données avec une explication complète des éventuels vides de données (extinction du signal, clarté de l’eau, etc.).
- Orthophotos prises simultanément à l’acquisition.
- Métadonnées conformes à la norme ISO 19115:2003.
- Trajectoire des lignes de vol.
- Points de vérification avec estimations d’exactitudes planimétrique et altimétrique.
- Selon les utilisations variables des données, modèle d’intensité lidar normalisée par la ligne de vol (retours du laser PIR sur terre terme et retours du laser vert du fond de la rivière).
Références
Klemas, V. (2011) Beach Profiling and LIDAR Bathymetry: An Overview with case studies. Journal of Coastal research vol. 27, no 6, p. 1019-1028. http://doi.org/10.3390/rs70505133
Legleiter, C. J. et Kyriakidis, P. C. (2008). Spatial prediction of river channel topography by kriging. Earth Surface Processes and Landforms, vol. 33, p. 155-161.
McGuigan, K., Webster, T., Collins, K. (2015). A Flood Risk Assessment of the LaHave River Watershed, Canada using GIS Techniques and an Unstructured Grid Combined River- Coastal Hydrodynamic Model. Journal of Marine Science and Engineering, 3(3) ISSN 2077-1312; doi:10.3390/jmse3031093.
National Oceanic and Atmospheric Administration Technical Memorandum NOS CS 32 (2013). A procedure for developing an acceptance test for airborne bathymetric lidar data application to NOAA charts in shallow waters.
National Science Technology Council (2016). National Coastal Mapping Strategy 1.0: Coastal Lidar Elevation for a 3-D Nation (PDF, 000 Mo).
Olabarrieta, M. et Warner, J. C. (2016) Inwave: The Infragravity Wave Driver of Coast. COAWST Workshop. Woods Hole 2016.
Organisation hydrographique internationale (2008). Normes OHI pour les levés hydrographiques (Publication spéciale no 44), p. 1-28. Monaco : Bureau hydrographique international.
Saylam, K., Hupp, J. R., Averett, A. R., Gutelius, W. F., et Gelhar, B. W. (2018). Airborne lidar bathymetry: assessing quality assurance and quality control methods with Leica Chiroptera examples. International Journal of Remote Sensing. Vol. 30 no 8; doi:10.1080/01431161.2018.1430916 p. 2518-2542.
Service hydrographique du Canada (2013). Normes pour les levés hydrographiques. Édition 2.
Webster, T., McGuigan, K., Crowell, N., Collins, K. et MacDonald, C. (2016). Optimization of data collection and refinement of post-processing techniques for Maritime Canada’s first shallow water topographic-bathymetric lidar survey. Journal of Coastal Research. Numéro spécial sur les avancées dans le lidar topo-bathymétrique. Volume 76, doi:10.2112/SI76-004, p. 31-43.
Appendice 6 − Contrat
Le guide d’orientation cadre avec les spécifications relatives à la collecte de données lidar aérien, et le contrat définit les exigences spécifiques visant la modification ou l’amélioration du présent guide. Les éléments contractuels clés sont énoncés ci-dessous.
Définition
Inclure une liste des termes utilisés dans le contrat, accompagnés de leur définition.
Renseignements sur le fournisseur
Renseignements sur le fournisseur, y compris sa dénomination sociale, son centre opérationnel et les coordonnées de la personne-ressource.
Portée
Les exigences spécifiques au projet seront énoncées dans la présente section. Cette dernière comprendra les demandes relatives aux données (p. ex., données de forme d’onde, assurance qualité accrue lorsque le fournisseur exige un échantillonnage accru, et une densité d’impulsions supérieure). Le calendrier et les détails relatifs aux produits à livrer devraient également être clairement présentés.
Voici une liste de certains des éléments contractuels prévus dans la portée du projet dont l’autorité contractante devrait tenir compte :
- ZICD
- Densité d’impulsions exigée
- Examen de la méthode
- Écarts en matière d’instrumentation
- Exactitudes altimétrique et planimétrique
- Demande de données d’impulsions, de données intermédiaires ou de données de forme d’onde
- Période de collecte de données
- Considérations relatives aux points de vérification, y compris le nombre de personnes qui réaliseront l’initiative et leur nom
- Propriété et utilisation des données
- Plan de contingence
- Période consacrée à la validation et à la vérification des données sur les produits à livrer dans le cadre du projet
- Exigences relatives aux données brutes
- Champs additionnels post-classification
- Tout produit dérivé (c.-à-d., MNA, contours, aplanissement des masses d’eau)
- Dimension et format des tuiles, et convention d’appellation
- Renonciations ou ajustement pour les zones à fort relief, aux secteurs enneigés et aux conditions de végétation
- Acceptation des fichiers LAZ compressés
- Utilisation de systèmes de référence virtuels
- Nombre de vérification de la classification
- Conditions pour le rejet des données (p. ex., vides de données ou densité des données)
Assurance
Une assurance couvrant les aéronefs et les automobiles est requise. Cette assurance doit comprendre une assurance responsabilité civile commerciale générale et une assurance responsabilité contre les erreurs et les omissions. Les montants spécifiques couverts par ces assurances seront indiqués. L’autorité contractuelle serait désignée « passager » sur la police d’assurance.
- Confirmer la police d’assurance et fournir le certificat demandé
- Confirmer la police d’assurance contre les accidents en milieu de travail
Sécurité
Un plan de sécurité sera fourni afin d’assurer que les données sont recueillies en toute sécurité, surtout en régions éloignées. Ce plan identifiera et évaluera les risques, il comprendra un plan d’atténuation et il indiquera l’équipement de sécurité requis. La sécurité doit respecter toute la réglementation du gouvernement fédéral et provincial. Exemples : sécurité routière des véhicules, heures de la collecte des données et dangers liés à la faune.
- Demander le plan de santé et de sécurité du fournisseur
Clause de résiliation
Condition si le fournisseur faillit à ses responsabilités ou s’il viole le contrat. Une clause de résiliation indiquant les conditions d’une résiliation sera incluse dans le contrat.
Résolution des différends
Advenant un désaccord concernant le contrat ou les modalités des besoins, cette section traitera en détail du processus de résolution du différend, y compris de l’avis du fournisseur ou de l’autorité contractante, du processus de médiation et des mesures qui peuvent être prises.
Renonciation
Toute exception ou modification des modalités du contrat et de la collecte de données faite par l’autorité contractante doivent être présentées par écrit avant leur mise en œuvre.
Période d’examen des produits à livrer
Le fournisseur fournira, dans le cadre des produits qu’il doit livrer tôt dans le cadre du projet, un plan présentant la méthode qui permettra de respecter les objectifs établis par le guide d’orientation en matière de collecte de données, de traitement et des produits à livrer. Une période adéquate doit être prévue pour inspecter et accepter les produits à livrer. Les modalités doivent être indiquées et un certificat doit être fourni par le fournisseur pour tous les travaux acceptés.
Modalités de paiement
Les paiements financiers liés au projet devraient tenir compte des coûts initiaux des opérations aéroportées et des produits à livrer. Les paiements d’étape et le pourcentage des paiements doivent être compris dans la structure du contrat. Toute retenue doit être indiquée.
Sous-traitants
Tout changement additionnel de sous-traitant nécessite le consentement écrit de l’autorité contractante. Les sous-traitants sont tenus de respecter toutes les exigences relatives aux assurances et à la sécurité au travail.
Force Majeure
Une description de tout bris de contrat découlant d’événements tels une guerre, une émeute, un incendie, un acte de sabotage, la sécurité nationale ou tout autre événement ou circonstance qui ne peuvent être raisonnablement prévus et qui n’ont pas été causés par un acte, une omission ou une négligence et qui échappent au contrôle du fournisseur ou de l’autorité contractante. Cette section doit comprendre les conditions et les avis relatifs à ce qui se passerait.
Intégralité de l’entente
Le contrat doit préciser toutes les conditions, les exigences et les spécifications. Aucune autres modalité, entente ou condition ne liera les parties.
Prestations des services
Clause indiquant la rigueur des délais et la volonté à réaliser les tâches exigées dans les délais prescrits. L’autorité contractante pourrait mettre fin au contrat en cas de défaut ou selon des conditions convenues mutuellement.
Permis
Une clause indiquant l’ensemble des permis requis pour réaliser les vols, pour accéder aux lieux par la voie terrestre ou toute autre exigence concernant la prestation des services et la fourniture des produits. Le fournisseur doit obtenir ces permis à ses frais.
Conformité aux lois
Clause visant à lier le fournisseur et tout sous-traitant, représentants et entrepreneurs afin qu’ils respectent toutes les lois et réglementations applicables de tous les paliers gouvernementaux. Le fournisseur indemnise également l’autorité contractante pour toute négligence de la part du fournisseur, de ses représentants et de ses sous-traitants.
Expédition
Une clause peut être ajoutée au contrat pour accélérer les travaux et la livraison des produits s’il devient apparent que les échéanciers ne seront pas respectés.
Garantie
Une garantie visant les produits à livrer est fournie. Cette garantie couvre le respect des spécifications, la quantité et la qualité. La garantie doit comprendre une période pour la correction des non-conformités. La clause de garantie peut porter sur toute responsabilité potentielle découlant d’un produit défectueux.
Lois applicables
Les lois en vertu desquelles le contrat s’applique peuvent être provinciales, fédérales et/ou internationales.
Indemnisation
Le contrat devrait contenir des clauses relatives à toute indemnisation pour la non-prestation d’un service ou la non-livraison d’un produit, pour toute négligence dans la réalisation de la collecte des données ou pour toute violation de contrat.
Confidentialité
Les renseignements que le fournisseur transmet à l’autorité contractante sont confidentiels et sont protégés contre toute utilisation, divulgation ou reproduction non autorisées.
Successeurs et attributions
Une clause pourrait empêcher un vendeur de transférer le contrat à une autre partie sans le consentement de l’autorité contractante. Cette clause indiquerait les droits de l’autorité contractante d’accepter ou de refuser la demande.
Propriété des données
Les données appartiennent à l’autorité contractante, laquelle est la seule à pouvoir les utiliser. Le modèle de propriété des données déterminé entre l’autorité contractante et le fournisseur varie de projet en projet.