
Interprétation des images polarimétriques
L'un des principaux objectifs de la télédétection est la construction de cartes thématiques de la surface de la Terre, indiquant la nature de la surface de chaque point observé par le radar. L'exécution d'un algorithme de classification par un ordinateur permet d'inférer la nature de la surface à partir des données polarimétriques. Il assigne à des pixels, ou des groupes de pixels, une classe de terrain pour laquelle existe une interprétation géoscientifique réelle.
Un radar polarimétrique permet de mesurer un plus grand nombre de paramètres qu'un radar monocanal. On devrait donc pouvoir classifier les images avec plus de précision. Toutefois, pour obtenir une classification précise, on doit surmonter de nombreux obstacles : bruit de mesure, complexités de l'étalonnage du système, compréhension des mécanismes de diffusion, confusion de ces divers mécanismes dans un seul pixel ou groupe de pixels. Nous nous intéressons dans ce chapitre aux problèmes d'étalonnage et d'interprétation des images. Le chapitre 7 présente les détails des algorithmes de classification.
Étalonnage des données
L'étalonnage constitue l'une des difficultés critiques de l'utilisation des radars polarimétriques puisqu'une grande partie des données fournies par les systèmes de radar polarimétriques est sous la forme de rapports d'amplitudes et de différences de phase de l'onde rétrodiffusée dans les quatre combinaisons de polarisations. Un étalonnage insuffisamment précis se traduira par une mauvaise interprétation de diffusion et donc à une perte des avantages de l'utilisation de plusieurs polarisations.
On arrive à étalonner les données en exploitant la conception du système et en analysant les observations. Considérons, par exemple, l'onde renvoyée par le réflecteur trièdre (en coin), dont la signature polarimétrique est montrée à la Figure 6-1. La réponse idéale est caractérisée par une matrice de diffusion identité :
![]()
Elle n'est possible que si les quatre canaux ont le même gain, que les différences de phase entre les canaux soient corrigées à zéro, qu'il n'y ait pas d'échange d'énergie (interférence) d'un canal à l'autre, et qu'il n'y ait pas de bruit de réception. Aucun système radar n'a ces caractéristiques idéales, mais si on peut mesurer ces déséquilibres, on pourra, lors de l'étalonnage, les corriger largement.
Lors de la conception du radar, on devrait harmoniser les gains et les phases des canaux avec le plus de soin possible. Pour équilibrer les phases, on devra s'assurer que les trajets de tous les canaux sont de la même longueur. Lors de sa fabrication, on intègre souvent au système des émetteurs de signaux d'étalonnage qui permettront de mesurer le déséquilibre entre les canaux.
L'analyse des données reçues de cibles particulières nous permet de mesurer et corriger le déséquilibre entre les canaux (amplitude et phase), l'interférence et le bruit. Ainsi, en plus d'analyser la réponse du système à ses signaux d'étalonnage interne, on pourra étalonner certains des paramètres à partir de signaux de sources connues : réflecteurs polyédriques (dièdres, trièdres, etc.), transpondeurs actifs, fouillis uniforme et ombre radar.
On a mis au point plusieurs méthodes d'étalonnage, certaines destinées à un capteur particulier ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Une difficulté commune est la variation des paramètres d'étalonnage en fonction de l'angle de site (caractéristiques de l'antenne) et de l'angle d'incidence (caractéristiques de la diffusion). La procédure d'étalonnage devra tenir compte des variations de distance de la scène.
. Une difficulté commune est la variation des paramètres d'étalonnage en fonction de l'angle de site (caractéristiques de l'antenne) et de l'angle d'incidence (caractéristiques de la diffusion). La procédure d'étalonnage devra tenir compte des variations de distance de la scène.
En plus de compenser les déséquilibres dans le système, l'étalonnage doit résoudre des problèmes d'interprétation des valeurs du gain absolu et de position géométrique des échantillons analysés. On place habituellement sur le sol des réflecteurs polyédriques des étalonneurs radar actifs pour régler ces problèmes. Pour le positionnement géométrique, on utilise un simple réflecteur, peu coûteux, fait d'un grillage métallique (figure 6 1). Toutefois, on utilisera un réflecteur polyèdre construit avec grande précision ou un étalonneur radar actif pour les mesures précises du gain (figure 6-2).
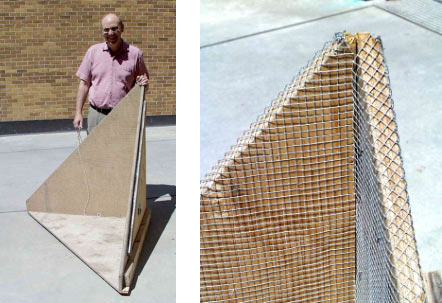
Figure 6-1 : « Réflecteur en coin » de 1,4 mètre utilisé pour l'étalonnage géométrique. Les surfaces internes se croisent à 90° et sont couvertes d'un grillage conducteur afin de produire une rétrodiffusion intense. Bob Hawkins, spécialiste de l'étalonnage du Centre canadien de télédétection est l'heureux père.

Figure 6-2 : Petit (40 cm) et grand (140 cm) réflecteurs trièdres, utilisés par le Centre canadien de télédétection pour l'étalonnage radar. À basse fréquence, on utilise de plus grands réflecteurs puisque la puissance du signal renvoyé est proportionnelle au carré de la fréquence du radar.
Interprétation à partir de modèles de diffuseurs
Le prochain niveau de complexité consiste à déterminer quels sont les mécanismes de diffusion à l'œuvre. Van Zyl ![]() a élaboré une méthode de classification non dirigée, basée sur un simple test mathématique, qui répartit les pixels d'une image selon le mécanisme de diffusion : écho pair, écho impair et écho diffus. Il exploite le principe que les échos renvoyés par les diffuseurs dont la structure géométrique est simple sont concentrés dans la polarisation parallèle au signal et le fait que la différence de phase entre les canaux HH et VV indique si le nombre de réflexion du signal radar est pair ou impair (la phase relative change de 180° à chaque réflexion).
a élaboré une méthode de classification non dirigée, basée sur un simple test mathématique, qui répartit les pixels d'une image selon le mécanisme de diffusion : écho pair, écho impair et écho diffus. Il exploite le principe que les échos renvoyés par les diffuseurs dont la structure géométrique est simple sont concentrés dans la polarisation parallèle au signal et le fait que la différence de phase entre les canaux HH et VV indique si le nombre de réflexion du signal radar est pair ou impair (la phase relative change de 180° à chaque réflexion).
Freeman et Durden ![]() ont élaboré un ensemble de modèles de diffusion à partir d'archétypes physiques. Pour catégoriser les diffuseurs trouvés dans la nature, ils proposent comme « diffuseur universel » un arbre poussant sur un sol inégal à partir duquel ils ont créé des modèles de la rétrodiffusion du signal radar par le houppier, le tronc et le sol. Ils ont créé une procédure mathématique pour calculer le pourcentage de chaque type de diffuseur dans chacun des pixels. Cette méthode est analogue à celle de van Zyl, sauf que pour séparer les mécanismes de diffusion, ils ont utilisé un modèle physique plutôt qu'une règle purement mathématique.
ont élaboré un ensemble de modèles de diffusion à partir d'archétypes physiques. Pour catégoriser les diffuseurs trouvés dans la nature, ils proposent comme « diffuseur universel » un arbre poussant sur un sol inégal à partir duquel ils ont créé des modèles de la rétrodiffusion du signal radar par le houppier, le tronc et le sol. Ils ont créé une procédure mathématique pour calculer le pourcentage de chaque type de diffuseur dans chacun des pixels. Cette méthode est analogue à celle de van Zyl, sauf que pour séparer les mécanismes de diffusion, ils ont utilisé un modèle physique plutôt qu'une règle purement mathématique.
Lorsqu'ils sont confrontés à un grand nombre de paramètres mesurés, les classificateurs fonctionnent beaucoup mieux si on peut transformer ces paramètres pour créer un ensemble de paramètres orthogonaux dont le nombre sera limité aux paramètres qui contiennent des informations cohérentes (c.-à-d. après avoir retiré les paramètres de bruit). Les méthodes aux valeurs propres peuvent s'avérer avantageuses, et il est également utile d'utiliser des modèles de diffusion qui sont indépendants du contenu de la scène. Une des méthodes de sélection de paramètres les plus récentes, proposée par Cloude et Pottier ![]() (Décomposition de Cloude), est basée sur la décomposition en valeur propre de la matrice de cohérence. À partir des valeurs propres et des vecteurs propres de la matrice, on calcule trois paramètres : l'entropie polarimétrique, l'anisotropie polarimétrique et l'angle
(Décomposition de Cloude), est basée sur la décomposition en valeur propre de la matrice de cohérence. À partir des valeurs propres et des vecteurs propres de la matrice, on calcule trois paramètres : l'entropie polarimétrique, l'anisotropie polarimétrique et l'angle ![]() .
.
L'entropie polarimétrique, H, représente le caractère aléatoire de la diffusion; H = 0 indique qu'un seul mécanisme de diffusion est à l'œuvre; H = 1 indique qu'une collection de mécanismes de diffusion aléatoires est en cause, en d'autres termes, que la cible dépolarise le signal. Les valeurs intermédiaires indiquent le degré de domination d'un diffuseur particulier. L'angle ![]() est calculé à partir des vecteurs propres et indique le mécanisme de diffusion moyen ou dominant. Une valeur
est calculé à partir des vecteurs propres et indique le mécanisme de diffusion moyen ou dominant. Une valeur ![]() = 0° indique la diffusion par une surface, alors que
= 0° indique la diffusion par une surface, alors que ![]() = 45° indique une diffusion dipolaire ou par un volume et que
= 45° indique une diffusion dipolaire ou par un volume et que ![]() = 90° indique une diffusion par un dièdre ou des réflexions multiples. Le dernier paramètre utile, l'anisotropie polarimétrique, A, se calcule à partir du rapport des valeurs propres et signale la présence de multiples diffuseurs.
= 90° indique une diffusion par un dièdre ou des réflexions multiples. Le dernier paramètre utile, l'anisotropie polarimétrique, A, se calcule à partir du rapport des valeurs propres et signale la présence de multiples diffuseurs.
Interprétation visuelle
La méthode de classification la plus simple est l'interprétation visuelle. Un interprète apprend comment les différentes surfaces apparaissent dans une image et, en utilisant ses connaissances des lieux et son expérience, ajoute les détails manquants.
Pour aider à l'interprétation visuelle, on peut utiliser la couleur pour représenter les données des différents canaux polarimétriques dans une image et faire ressortir certaines entités qu'un interprète bien formé reconnaîtra facilement. Par exemple, on peut créer une image couleur en assignant aux canaux HH, HV et VV les couleurs rouge, vert et bleu (voir figure 6 3). L'image créée a une apparence « réaliste » puisque les réflexions sur l'eau sont plus intenses dans le canal VV que le canal HH, et que la diffusion de la végétation est plus forte dans le canal HV.
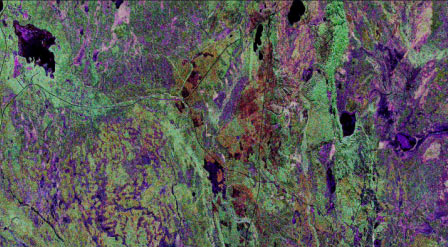
Figure 6-3 : Image composite du parc provincial Narrow Hills (anciennement Nipawin), au nord de Prince Albert (Saskatchewan) prise avec le Shuttle Composite Radar C dans la bande L. (Codage, HH : rouge, HV : vert, VV : bleu.)
La description qui suit est un exemple d'interprétation, elle décrit l'image présentée dans une des pages Internet de la NASA : http://visibleearth.nasa.gov/. Recherche: Space Radar Image of Prince Albert, Canada
Cette image composite en fausses couleurs a été prise au dessus de Prince Albert, au Canada, à 53,91° de latitude nord et 104,69°de longitude ouest, avec le Radar imageant spatial C - Radar à synthèse d'ouverture dans la bande X (l'instrument SIR-C/X-SAR), à bord de la navette spatiale Endeavor, pendant sa vingtième orbite. La carte montre une région située à 40 kilomètres au nord et 30 kilomètres à l'est de Prince Albert (Saskatchewan), l'une des provinces du Canada. Elle couvre la région à l'est du lac Candle, entre les routes de gravier numéros 120 et 106, à l'ouest de la route 106. Le parc provincial de Narrow Hills (anciennement Nipawin) occupe le milieu de l'image. L'angle de site du radar était de 30° et l'image couvre environ 20 par 50 kilomètres.
Cette image ne contient que des observations dans la bande L. Les trois canaux de polarisation montrés, HH, HV et VV, sont représentés en rouge, vert et bleu. Les variations d'intensité de chaque couleur indiquent un changement des conditions à la surface, notamment les variations du peuplement forestier, le gel ou le dégel du sol, les perturbations causées par le feu ou le déboisement, et les aires de recrû forestier. La plupart des plages sombres de l'image représentent des lacs couverts de neige. La plage sombre au coin supérieur gauche est le lac White Gull, lequel s'étend au nord de l'intersection des routes 120 et 913. On peut voir à droite, au milieu de l'image, le lac Ispuchaw et le lac Fishing inférieur. Les aires déboisées apparaissent en couleur sombre dans l'image. Dans la région de Prince Albert, on pratique le bûcheronnage près des grandes routes, ainsi les aires de coupes apparaissent comme de petites formes géométriques sombres, le long de celles-ci.
Lors du passage du radar, au printemps, une grande partie de la forêt était encore gelée ou en période de dégel. La forêt de pin gris est très brillante dans le canal HH de la bande L. Les plages rougeâtres représentent les vieilles forêts de pins gris, hauts de 12 à 17 mètres et âgés de 60 à 70 ans. Les régions orange verdâtre sont formées de jeunes pins gris, hauts de 3 à 5 mètres et âgés de 11 à 16 ans. Les régions vertes sont causées par la forte intensité du signal du canal HV et sont fortement corrélées avec le volume de la biomasse. Le canal HV dans la bande L montre des variations de biomasse dans toute la région. La comparaison de l'image avec les cartes du couvert forestier indique que la plupart des aires vertes sont peuplées d'épinettes noires. Les plages bleu foncé et violettes représentent respectivement des aires récemment déboisées et en régénération.
Détails de la page
- Date de modification :